美国亚马逊 FAR、麻省理工、加州大学伯克利分校、斯坦福大学、卡内基梅隆大学等高校团队本周公布了最新研究成果 —— OmniRetarget,这是一个基于交互网格的交互保留数据生成引擎,可以生成运动学上可行的轨迹。
根据研究团队放出的演示视频,宇树 G1 人形机器人完成了一个复杂、长时程的动态序列,完全由本体感觉策略驱动(无需视觉 / 激光雷达)。
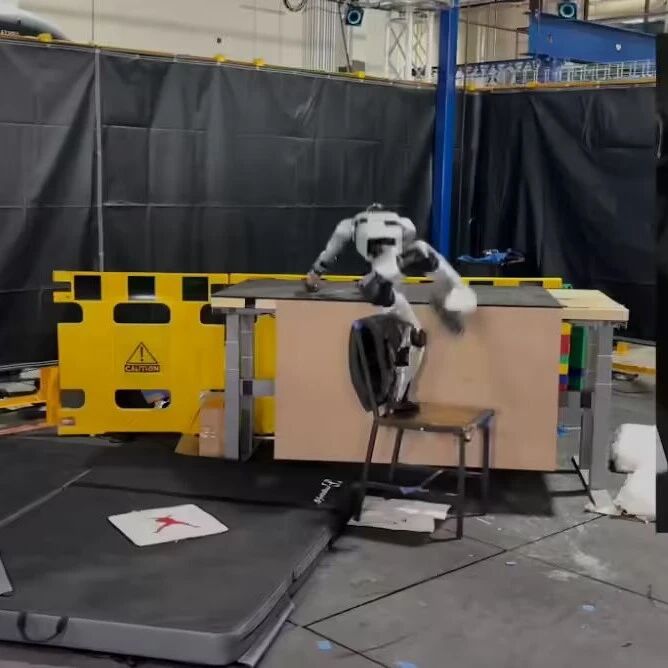
在一个任务中,宇树 G1 机器人携带一把椅子到桌子旁,将其作为踏板爬上去,然后跳下并执行类似跑酷的翻滚动作来缓冲落地。

OmniRetarget 是一个基于交互网格的交互保留数据生成引擎,它明确建模并保留了智能体、地形和被操作物体之间关键的空间和接触关系。通过最小化人类和机器人网格之间的拉普拉斯变形,同时强制执行运动学约束,OmniRetarget 生成了运动学上可行的轨迹。
研究团队通过从多个数据集中重新目标追踪运动,全面评估了 OmniRetarget,生成了超过 9 小时轨迹,这些轨迹在运动学约束满足和接触保持方面优于广泛使用的基线。这种数据使本体感觉强化学习策略能够在宇树 G1 人形机器人上成功执行长时程(长达 30 秒)的跑酷和运动操作技能,仅使用 5 个奖励项和所有任务共享的简单领域随机化进行训练,没有任何学习课程。

该团队放出了多个演示案例,包括翻滚、爬桌子、跳上小箱子、爬行等。

此外,OmniRetarget 能够让人形机器人以多种风格进行运动操作,比如 8 种搬箱子的动作。

该研究的论文、数据集均已公布,代码将在后续放出,IT之家附研究页面地址:
https://omniretarget.github.io/




免责声明
文章来源:IT之家
凡资讯来源注明为其他媒体来源的信息,均为转载自其他媒体,并不代表本网赞同其观点,也不代表本网对其真实性负责,转载请联系原出处。您若对该文章内容有任何疑问或质疑,请立即与后台小编联系,平台将迅速给您回应并做处理。注明本公司原创内容,转载与商务合作请联系慕老师159 0176 7989(微信同号)。