在医疗介入、工业检测等对操作精度要求极高的领域,机器人常需在高度受限且敏感的环境中执行任务,其核心挑战在于如何实现低环境干扰与高路径适应能力。以血管介入手术为例,器械往往要在直径仅数毫米的血管中穿行,且必须将对血管壁的压力严格控制在安全阈值内。早期的连续体机器人虽借助柔性主干实现形变导航,但其推进方式多依赖基座驱动,行进过程中易对管壁产生法向力和剪切力。同时,为承受轴向推力,机器人需维持一定刚性,这限制了其在毫米级尺度下的进一步微型化。
相比之下,柔软机器人借鉴了自然界生物的运动机制,采用柔韧材料与创新驱动方式实现移动。其中,外翻机器人作为一种特殊构型,其运动过程类似于将袜子从里向外翻转——通过材料外翻实现从尖端延伸身体,而非从基座推动前进。
这种运动方式带来两大核心优势:一是显著降低了机器人本体与环境的交互作用,减少了移动过程中的碰撞与摩擦;二是实现机器人身体始终沿尖端已探明路径前进,特别适用于管道、洞穴或人体血管等约束空间内的穿行任务。
然而,尽管外翻机器人在被动顺应环境方面表现优异,其在复杂结构中的主动转向问题长期以来悬而未决。现有转向机制,例如气动人工肌肉或肌腱牵引,往往难以在微型化条件下维持机器人完全柔软的构型,且通常依赖半刚性部件或外部设备(如磁场)辅助,限制了实际应用的广度与深度。
▍LCE “智能皮肤”,机器人的柔性驱动核心
为了解决这一挑战,来自美国加州大学圣地亚哥分校等机构的研究团队提出了一种全新的设计思路:利用液晶弹性体(LCE)执行器对机器人皮肤进行功能化,从而创造出毫米级、可转向柔性机器人。该成果以“LCE-integrated soft skin for millimeter-scale steerable soft everting robots”发表在国际权威期刊《Science Advances》上。

LCE是一类将液晶基元与聚合物弹性网络结合的功能材料,具备显著的温度响应特性。当温度升高至相变阈值时,其长度可收缩30%以上;温度降低后则恢复原长,形成可逆的“温度-形变”响应。这种特性使LCE成为理想的柔性驱动单元,且具备高拉伸性、良好生物相容性与低驱动电压需求。
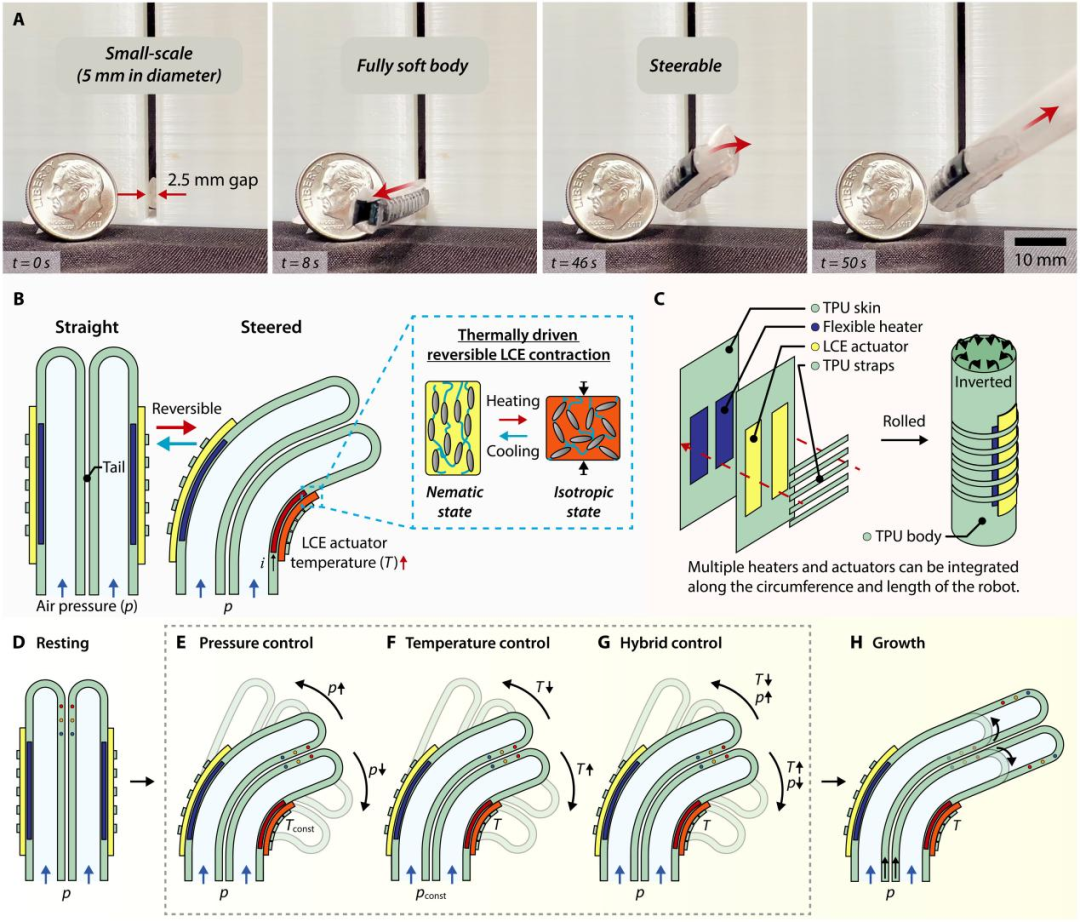
LCE驱动的可操纵软体外翻机器人结构概览
在结构方面,机器人的“皮肤”以柔性热塑性聚氨酯(TPU)薄膜为基底,将LCE条与导电聚合物(PEDOT:PSS)柔性加热器按“夹层结构”嵌入。加热器位于内层,用于向LCE条传递热能;LCE条两端固定于外层TPU薄膜,通过细带约束以确保与加热器的贴合度。将该复合结构卷制成管状,即构成机器人主体:主体一端固定于基座以避免位移,管内充入空气;当单侧加热器通电时,同侧LCE条受热收缩,带动管状主体向收缩侧弯曲,实现转向和延伸。
这种设计的巧妙之处在于,机器人的皮肤不仅作为保护层,还集成了驱动和传感功能。通过在不同位置布置多组执行器和加热器,机器人可以在多个点实现局部弯曲,甚至完成三维空间的复杂转向。
▍气压与温度:机器人转向的核心控制参数
为实现弯曲角度的精准调控,研究团队发现机器人内部气压与LCE 温度是两大核心控制参数,通过单独或协同调节,可满足不同场景下的转向需求。
压力控制:通过调节机器人内部的空气压力来改变弯曲角度。压力越低,机器人身体越柔软,弯曲角度越大;反之则弯曲角度减小。通过调节气压,弯曲角度可在36° 至 101° 之间线性变化,类似通过调节流体压力改变结构柔性的机制。需注意的是,气压需高于机器人实现尖端翻折延伸的最小气压,否则会影响运动功能。
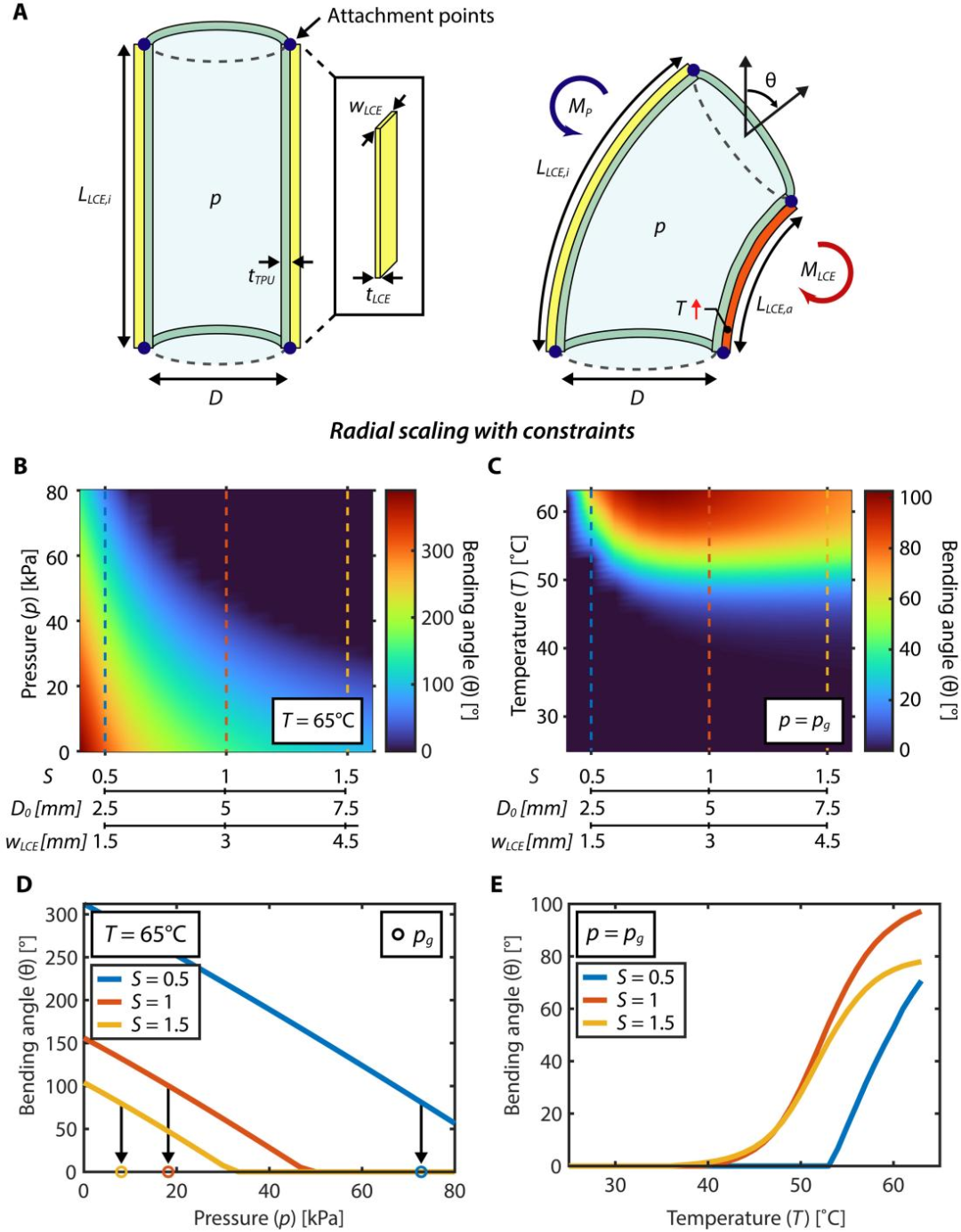
转向角的建模和缩放分析
温度控制:通过调节LCE执行器的温度来改变弯曲角度。温度越高,LCE收缩越大,弯曲角度也越大。在恒定气压下(如 27.6kPa),将 LCE 温度从 30℃升至 65℃,弯曲角度可从接近 0° 增至 99°。这种方法可以独立控制每个执行器,实现更精细的形状控制,但温度与弯曲角度的关系非线性,控制难度较高。

转向特性结果
混合调控:单独调控存在局限,气压调控易受最小气压阈值约束,温度调控则因LCE 相变敏感性导致角度易波动。为此研发的 “混合调控策略”,通过同步调节气压与温度实现优势互补。如需增大弯曲角度,可先降低气压以降低结构刚度,再适度升高温度增强LCE 收缩力;如需保持角度稳定,可在升高气压的同时调整温度,维持 LCE 收缩力平衡。

机器人使用三种转向控制方法导航曲折路径
该研究团队制造了长250 mm、直径3–7mm的多组样机,对不同LCE厚度、气压、温度与尺寸参数进行了系统测试。实验显示,直径仅5毫米的机器人能够在多个位置实现大于100°的弯曲角度,曲率高达57.9 m⁻¹,远超许多传统软体机器人。无论是穿过宽度仅为自身直径50%的狭窄缝隙,还是在曲折的路径中灵活转向,机器人都表现出了卓越的性能。
▍核心应用场景与技术优势验证
该机器人的柔性结构与精准转向能力,已在多类典型场景中完成验证,展现出显著的技术优势与应用潜力。
狭窄缝隙穿越
在工业检测中,设备内部常存在小于机器人直径的缝隙(如发动机气缸间隙、管道接口)。直径5毫米的机器人可通过适度提升气压(至28.0±0.4kPa),使柔性主体产生扁形变形,顺利穿越2.5毫米宽的缝隙(仅为自身直径的50%);穿越后通过调节气压与温度,可快速恢复转向能力,继续完成检测任务。相比传统刚性内窥镜,其对缝隙的适配性提升约3倍,且无刮伤零件的风险。
主动脉弓模型中的导管输送
主动脉弓是心脏输出血管的关键分叉结构,弯曲角度大(部分接近90°),传统导管难以精准导航,且易对血管壁产生挤压。研究团队采用3D打印构建主动脉弓模型,让直径5毫米的机器人携带2.06毫米外径导管进行导航:机器人通过分段加热LCE单元,依次实现30°、45°转向,精准进入无名动脉、左颈总动脉等目标分支,最终将导管输送至指定位置。实验数据显示,该机器人对血管壁的作用力较传统导管降低10倍以上,且可通过调整LCE成分将驱动温度降至35-45℃(接近人体体温),满足医疗安全需求。

机器人导航主动脉弓模型并将导管送入动脉
喷气发动机模型检测
喷气发动机内部叶片密集、路径复杂,传统检测需拆解设备,耗时且成本高。直径7毫米的机器人(集成微型摄像头)可通过柔性变形进入模型内部:遇到叶片间隙时,降低气压以增强柔性,避免碰撞叶片;遇到弯道时,通过3组圆周布置的LCE单元实现3D转向,精准对准检测目标;摄像头拍摄的画面通过内置导线传输至外部,实现“无拆解检测”。实验中,机器人成功到达3个指定检测点,包括叶片背面的狭小空间,检测覆盖率较传统内窥镜提升约60%。











