陈柳青团队发现,让学生观察机器人“解题失败”,比让学生自己经历解题失败或老师直接讲解,都更能提升学习效果,并有助于减轻课堂压力。该研究结果以《Observing a Robot Peer’s Failures Facilitates Students’ Classroom Learning》为题,于2025年9月10日发表在国际权威期刊《Science Robotics》。
1►为什么要让学生看机器人 “犯错”?先搞懂 “有益的失败”
要理解这个实验,得先从一个教育理论说起 ——有效失败(Productive Failure,PF)。
简单说,这个理论认为:让学生先尝试解决一道超出自己知识范围的题(大概率会失败),再听老师讲解,比直接听老师讲完再做题,能理解得更深。因为失败的过程会激活学生的已有知识,让他们更清楚自己的知识局限,后续听课会更有针对性。
但问题也很明显:直接让学生自己解题失败,风险太高了。
比如,一道超出能力的数学题,可能会让基础弱的学生直接放弃;同学间的对比会带来社交压力。“别人都有思路,就我不会”;反复失败还可能让学生怀疑自己的能力,产生焦虑。这些负面情绪反而会抵消 “失败学习” 的好处,让 PF 理论很难在真实课堂落地。
浙江大学团队的想法是:能不能让机器人代替学生 “失败”?
学生不用自己动手解题,只需要观察机器人尝试、犯错、反思的过程。这样既能保留 PF 理论的核心,通过 “失败” 激活知识、发现漏洞,又能避免学生直接面对失败的心理压力。毕竟,机器人的失败和自己的能力无关,学生可以更从容地分析“错在哪里”。
2►两个真实课堂实验:从标准差到导数,机器人“失败”真的有用
为了验证这个想法,团队在杭州一所中学做了两个递进的实验,前后覆盖 135 名和 110 名八年级学生,分别聚焦 “标准差” 和 “导数” 两个数学知识点。
实验 1:对比三种教学方式,机器人“失败”赢了
第一个实验把学生分成三组,用不同方式教 “标准差”:

研究 1 的实验流程:(A)各实验组的具体流程,包含前测、问题解决阶段、中期测试、教学讲解阶段及后测;(B)机器人同伴在介绍每种非最优解法时所采用的叙事结构;(C)教学讲解阶段中,教师讲解标准差的步骤。
•直接教学组(DI):传统模式,老师先讲标准差的概念和算法,再让学生做题。
•亲身失败组(PF):按经典 PF 理论,学生先自己尝试解决 “判断两名运动员成绩稳定性” 的难题,再听老师讲。

学生观察机器人同伴解决问题
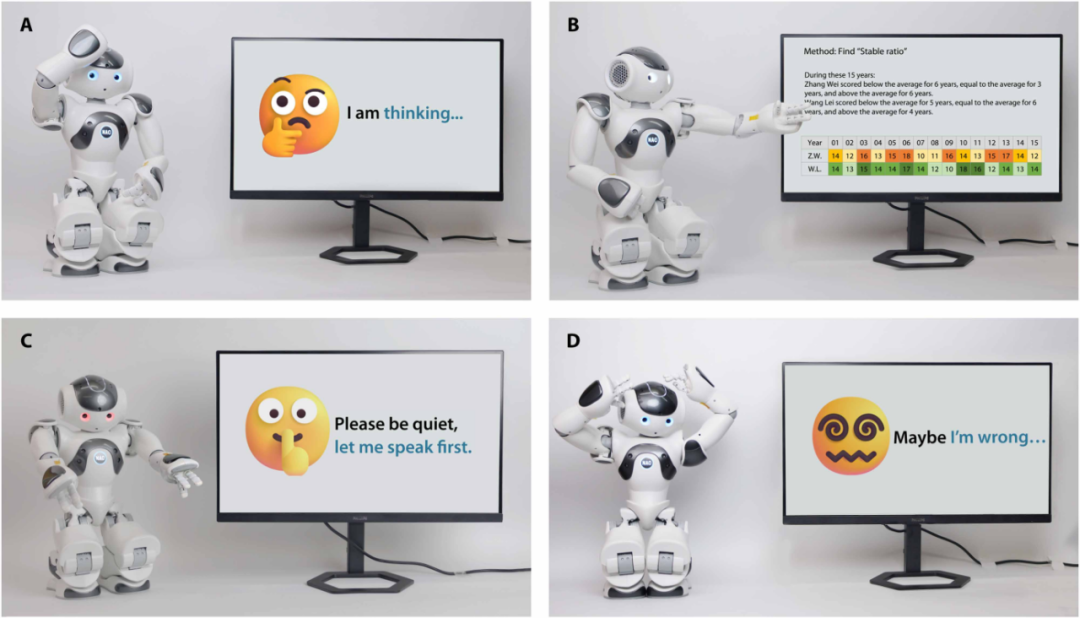
•观察机器人失败组(RF):学生围在 NAO 机器人旁,看机器人一步步给出 6 种典型的错误解法(比如只算平均值、忽略数据波动),每讲完一种,机器人会“反思”:“我只算了平均成绩,但没考虑每次成绩和平均值的差距,所以不对”。之后再听老师讲解。
机器人在问题解决与社交互动中的行为
结果很明确:RF 组的学生,在 “概念理解” 上得分最高,还报告了较低的课堂压力。

研究1的定量结果(样本量N=135)
具体来看:
•概念理解:RF 组显著优于 DI 组(比如能解释 “为什么标准差能衡量数据稳定性”),和 PF 组相当;
•解题步骤(程序性知识):PF 组低于RF和DI组 —— 因为学生自己解题时可能陷入错误思路,一时难以纠正;
•课堂体验:PF 组不少学生提到,当看到他人有思路而自己不会时,会感到尴尬;而在 RF 组中,几乎没有学生提到有压力。相反,许多 RF 组学生表示,不用自己动手做题,反而能更专注地分析问题。
机器人同伴有效失败教学法概述及主要研究发现
实验 2:排除 “新鲜感” 干扰,机器人的作用是长期的
第一个实验有个潜在疑问:学生会不会是因为 “第一次见机器人上课” 觉得新鲜,才学得更好?毕竟,新奇事物容易吸引注意力,但新鲜感会消退。
为了排除这个干扰,团队做了第二个实验,聚焦两个关键问题:新鲜感消退后,机器人 “失败” 还有用吗?学生真的会把机器人当 “同伴” 吗?

研究 2 的实验流程:该流程包含为期 2 周的适应期、一次前测,以及在第 15 天开展的教学实验。其中,教学实验由问题解决阶段、教学讲解阶段、课后问卷和一次后测组成。
实验设计更贴近真实教学场景:
•先安排 2 周 “适应期”:RF 组学生每天和 NAO 机器人一起上数学课,机器人会像普通同学一样举手回答问题(偶尔也会错),让学生习惯它的存在,新鲜感逐渐消失。
•之后教 “导数”:只保留 RF 组和 DI 组(第一个实验已证明 RF 优于 PF),用和实验 1 类似的方式教学 ——RF 组看机器人解导数难题失败,DI 组听老师直接讲。

研究 2 的定量结果(样本量 N = 110)
结果进一步验证了价值:
•新鲜感消退后,RF 组依然更强:在 “概念理解” 和 “知识迁移”(比如用导数解决新场景问题)上,RF 组显著优于 DI 组。尤其是导数这种抽象知识点,机器人的 “失败” 能帮学生避免陷入自己解题时的思维死角;
•学生真的把机器人当 “同伴”:学生更多将机器人视为“同伴”而非“教学工具”或“老师”。许多学生在反馈中提到:“机器人会举手回答问题,和我们一样,甚至会困惑,感觉就是班里的一员。” ;
•对机器人的评价相对理性:学生认为机器人“很聪明”(能清晰表达思路),但并不觉得它“像人”。这种理性的态度未必是坏事,一些研究指出,过度拟人化的形象可能会分散学习注意力。
3►机器人 “犯错” 的关键:不是乱错,而是 “有设计地错”
很多人可能会问:随便让机器人犯错就行?当然不是。团队在机器人的 “错误设计” 上花了很多心思,这也是实验成功的核心。

研究 1 与研究 2 定性反馈的主题分析
首先,机器人的错误不是随机的,而是基于学生的真实错误。团队整理了过去学生学 “标准差”“导数” 时最常犯的错误(比如算标准差时忘了开平方、导数理解成 “斜率的平均值”),再和数学老师一起筛选出 6 种最典型的错误解法 —— 这些错误能精准击中学生的知识漏洞,让学生看的时候有共鸣:“哦,我之前也会这么想”。
其次,机器人的 “失败” 有完整的叙事逻辑。每种错误解法都遵循 “目标→步骤→结果→反思” 的结构,比如:
“我的目标是判断运动员 A 和 B 的成绩稳定性。第一步,我计算了两人的平均成绩,都是 85 分;第二步,我觉得平均分一样,稳定性就一样。但反思后发现,A 的成绩波动很大(比如从 70 到 100),B 的成绩很稳定(80 到 90),所以只看平均分不对。”
这种结构化的 “失败”,能帮学生理清 “错在哪里”“为什么错”,而不是只看到一个混乱的错误结果。

不同条件下学生在课堂活动中的参与度:(A)观察机器人失败组(RF 组)中,机器人、显示屏、学生及研究者的位置分布;(B)观察机器人失败组(RF 组)中,6 至 8 名学生组成小组围在机器人同伴周围,观察其解题过程;(C)自己失败组(PF 组)中,学生需独立解决所布置的问题,但允许相互交流;(D)直接教学组(DI 组)中,教师直接向学生讲解标准差的概念及解题步骤。
最后,机器人会有 “社交行为”。比如思考时会低头,困惑时会皱眉,还会问学生:“你们有更好的办法吗?” 这些细节让学生更容易代入,把机器人当成 “一起学习的同伴”,而不是一个冷冰冰的机器。
4►机器人不是 “代课老师”,而是 “学习同伴”
这项研究最有价值的地方,不是证明“机器人能教学”,而是赋予了教育机器人新的角色——它不再只是教学工具或老师,而是一位会出错、能反思、会成长的学习同伴。
对老师来说,这种模式的可操作性很强:不需要复杂的编程,只需要根据学生的常见错误,准备机器人的 “错误解法脚本”(比如 15 分钟的 PPT 和语音),再设置简单的动作(比如思考、皱眉),1-2 天就能准备好一堂课。而且,机器人的 “失败” 可以反复用,尤其适合 STEM 学科,这类学科的错误思路往往有共性,比如物理的受力分析、化学的反应方程式,都能设计成机器人的 “失败案例”。
对学生来说,这种方式降低了 “犯错的心理门槛”。很多学生害怕在课堂上犯错,因为怕被同学笑话、被老师批评。但观察机器人犯错时,他们能跳出 “自我否定”,更理性地分析问题。就像实验里一个学生说的:“看机器人错了,我不会觉得紧张,反而会想‘如果是我,我会怎么改’,慢慢就明白知识点了。”
5►未来:让机器人成为 “个性化学习同伴”
当然,这个研究还有可以延伸的地方。比如,未来的机器人能不能根据学生的实时反应,调整 “错误难度”?如果学生很快发现机器人的错误,就给出更隐蔽的错误解法;如果学生没看懂,就放慢反思速度,甚至补充更多中间步骤。
但无论如何,这项研究已经证明了一个核心:教育的关键不是 “避免失败”,而是 “如何让失败变得有益”。机器人的价值,就是成为学生 “安全失败” 的载体 —— 让学生在没有心理负担的情况下,学会从错误中学习。
或许未来的课堂上,我们会看到更多这样的场景:机器人和学生一起 “做题”、一起 “犯错”、一起讨论。而老师,则从知识传授者变成错误分析的引导者。这可能就是科技赋能教育的真正意义:不是用机器替代人,而是用机器创造更友好、更有效的学习环境。
来源:具身智能大讲堂