11月19日,由智一科技旗下智猩猩联合智东西、机器人前瞻举办的2025中国具身智能机器人大会(EAIRCon 2025)将在深圳湾万丽酒店举办。
这也是智一科技在大湾区举办的首届机器人大会。今年以来,智一科技旗下智猩猩分别联合智东西、芯东西已先后成功举办2025中国生成式AI大会、2025中国AI算力大会、2025全球AI芯片峰会等大型会议。
2025中国具身智能机器人大会(EAIRCon 2025)为期一天,由主论坛+专题论坛+研讨会+展览区组成,将以“具身启智 机器觉醒”为主题,邀请40+位嘉宾带来致辞、报告、演讲和对话,全方位解构具身智能掀起的新一轮机器人革命。
目前,北京大学计算机学院副研究员兼信息技术高等研究院视觉智能实验室主任王钊已确认出席,将在大会分会场二下午的具⾝VLA⼤模型技术研讨会带来报告,主题为《开放世界具身视觉导航大脑》。

Part.1
嘉宾介绍
王钊,北京大学计算机学院副研究员兼信息技术高等研究院视觉智能实验室主任。在视频与视觉智能领域发表国际期刊会议论文30余篇,授权技术发明专利20余项,国际标准技术提案30余项。获评北京大学优秀博士学位论文、两次国际会议最佳论文奖等。曾任职于阿里巴巴达摩院,入选2019年“阿里星”人才计划与2021年达摩院“前沿研究者”计划,曾任国际视频编码标准工作组JVET智能编码专题组副主席。主持国自然青年科学基金、浙江省“尖兵领雁”研发攻关计划等项目,主持研发Ali266商用编解码器、开放世界具身视觉导航、机器人主动式视觉理解等系统。
Part.2
报告主题
《开放世界具身视觉导航大脑》。
Part.3
报告概要
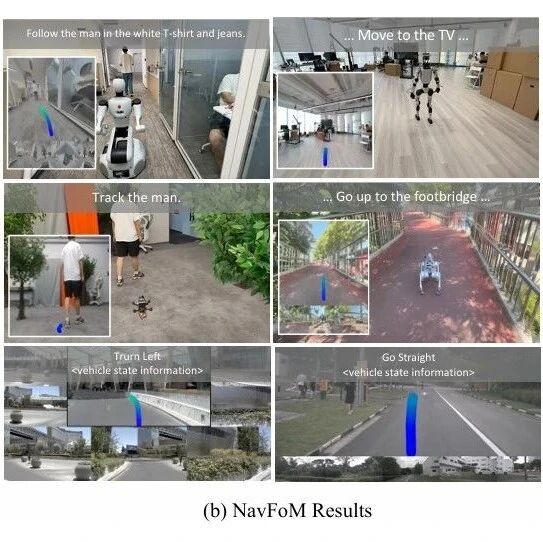
开放世界具身视觉导航大脑面向人形机器人、机器狗、无人车、消费级移动设备等各类具身实体提供开放环境中纯视觉自主导航方案。
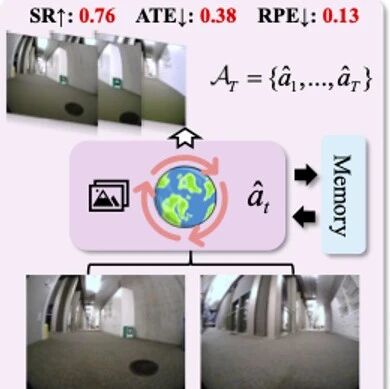
具身视觉导航大脑让机器人摆脱遥控器与激光雷达建图,仅使用视觉摄像头让机器人拥有眼睛一般看懂眼前世界,进行通行度理解和内容理解从而自主决策导航点,并结合时空域感知构建短期记忆地图完善路径规划。技术亮点:1)纯视觉导航、无需激光雷达;2)无需建图、随时随地可用;3)适应动态开放世界,不论室内还是室外、小区、道路、野外等场景。
技术应用场景有面向B端大区域的电子地图导航,如巡逻、物流、清扫机器人和面向C端的主动式/跟随式导航,如陪伴机器人。具身视觉导航大脑已应用在江苏某清扫无人车、深圳某人型机器人、上海某消费级移动机器人等客户场景,在公安场景的数字警犬示范应用被《人民日报》、《浙江日报》等媒体报道。

大会日程
大会为期一天,由一场主论坛、两场专题论坛、三场研讨会组成。
主论坛将于上午在主会场+分会场一拉开帷幕,将邀请知名学者、产业领袖、创业者、技术大咖和顶级投资人带来分享,并将进行一场高端对话。
具身智能人形机器人专题论坛、工业具身机器人专题论坛则将于下午在主会场先后进行,将分别聚焦人形机器人这一具身智能最佳载体及产业链层面的技术产品创新、具身智能机器人在工业领域的探索。
机器人模仿学习与强化学习研讨会、具身世界模型技术研讨会、具身VLA大模型技术研讨会则会在分会场一、二进行,将邀请来自高校、工业界的研究人员和技术专家带来主题报告和技术分享。其中,研讨会主要面向持有闭门专享票、贵宾通票的观众开放。


报名方式
大会设置了四类电子门票,分别是论坛观众票、论坛VIP票、闭门专享票和贵宾通票。会场座位分布如下。
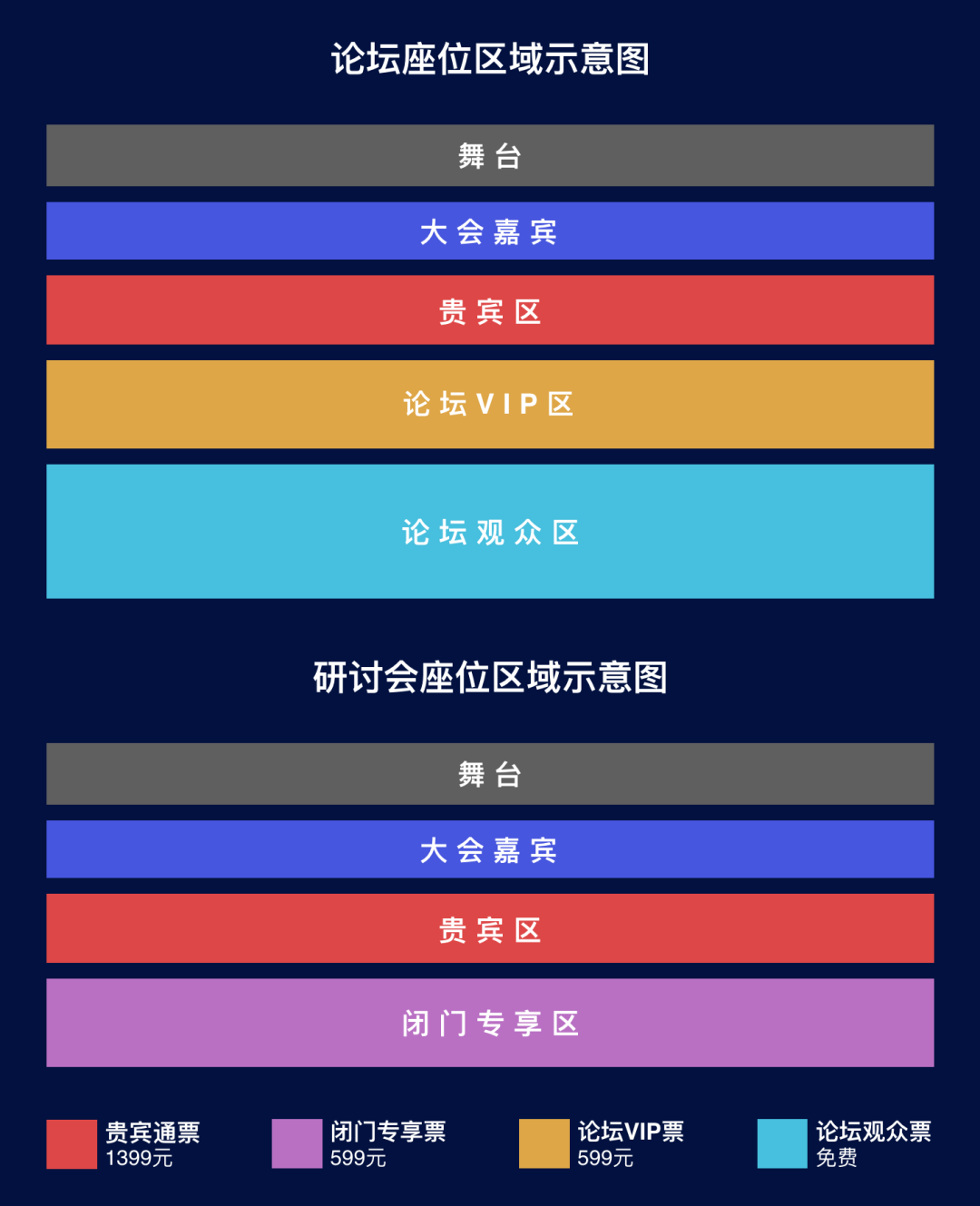
持论坛观众票、论坛VIP票可参加三场论坛(主论坛、具身智能人形机器人专题论坛、工业具身机器人专题论坛)。持有闭门专享票、贵宾通票,除了可参加三场论坛,还可参加分会场一、二的研讨会(机器人模仿学习与强化学习研讨会、具身世界模型技术研讨会、具身VLA大模型技术研讨会)。详细权益,可通过文末左下角「阅读原文」,直达官网了解后,进行购票或免费申请论坛观众票。
大家也可以扫描下方二维码添加小助手“小鸥”进行报名,已添加过“小鸥”的老朋友,可以给“小鸥”私信,发送“EAIR 25”即可报名。