(一)需求和应用 1. 端到端对于激光雷达的需求会发生什么变化?激光雷达需要做好哪些方面,可以更好赋能端到端开发? 从目前了解到技术方案来看,端到端对于激光雷达的需求暂时没有明显的变化。 可能有2个相关的点: 1)由于端到端的开发,会更重的依赖于闭环仿真环境,激光雷达的点云数据 需要仿真生成,可能会对激光雷达点云的仿真提出更高的要求。 2)不同类型、不同厂家激光雷达的点云Pattern会不同,Pattern的不同会影响端到端模型的训练。因此采用端到端技术时,如果需要更换不同Pattern激光雷达,意味着数据需要重新采集、模型需要重新训练,因此切换难度将更大,因此激光雷达供应商和自动驾驶方案商的绑定关系可能会强。
2. 激光雷达在高阶智驾下的应用场景及价值,在前融合,后融合中的应用是怎样的? 激光雷达主要作用是检测车辆、行人,以及更重要的通用障碍物、路边边缘,有些场景还可以辅助检测车道线。 激光雷达可以应用的主要功能如下:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71qo5" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-922a38baa8b464139cfd48b0b38a7b4d_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="2001" contenteditable="false" data-ratio="0.5138888888888888" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:https://liangdao.com/news/show.html?id=9
其中,补盲激光雷达主要负责的是近车身的感知空间的覆盖,为自动驾驶车辆提供更为精准的车身周围障碍物和空间感知能力。可以实现:
前方探测:AEB front(ped/cyclist)、AEB-crossing、ACC S&G/i-ACC自适应巡航系统、ICA智能巡航辅助、TJA交通拥堵辅助驾驶;
侧后方探测:LCAS/ALC/AES交通拥堵辅助、RCTA后方交通穿行提示、DOW车门开启预警、泊车功能(APA/RPA、AVP、AVM等);
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71o0r" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-171960378e5c84bfd5c87d50d9d7134d_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="820" contenteditable="false" data-ratio="0.7444444444444445" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 前融合,后融合中的应用: 1)前融合是将点云直接和视觉图像、毫米波雷达 点云做RAW级别的融合,开发难度较高,目前有华为、小鹏等少量头部玩家在使用。 2)后融合是在域控制器基于激光雷达点云进行目标识别,包括交通参与者、通用障碍物、路边缘等识别。是目前大部分玩家所采用的方案。 随着端到端技术和大模型的推进,目前融合趋势是逐渐走向前融合。
3. 激光雷达有哪些方面是无可取代的? 激光雷达、毫米波雷达、摄像头等传感器各有特点,各有优劣势。其中, 激光雷达在角分辨率、点云密度方面远高于毫米波雷达,在测距精度、黑暗天气适应性等方面强于摄像头。
激光雷达、毫米波雷达、摄像头所使用的波长不同,示意图如下(超声波使用的是机械波,和上述几种传感器差异较大):
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7t9" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-f799d796500506722d98ef2dc974564d_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1050" contenteditable="false" data-ratio="0.5708333333333333" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:网络,后处理:雪岭飞花 每种传感器检测原理不同,因此有不同的感知特点,有各自的优势场景:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7r70" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-293c8691fb733924fca4e97bd3ff9bdc_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1080" contenteditable="false" data-ratio="0.5402777777777777" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 对于要求不高的自动驾驶系统中,单一传感器可以实现感知需求(例如纯视觉)。自动驾驶等级越高,对于感知的要求也越高,要求配置的传感器数量和种类也越多。对于L3及以上等级的自动驾驶系统,由于功能安全的冗余要求,必然需要2种及以上异构感知单元,以避免同源失效。 从目前来看,城市NOA以及L3及以上场景,激光雷达是不可或缺的。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7pl2" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-0fc502e6fbd4623ebb943821713405e0_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1080" contenteditable="false" data-ratio="0.49722222222222223" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:Yole 4. 主机厂对激光雷达原始数据的需求未来会有哪些变化?这些变化的驱动力是什么?(例如把一些数据处理放在域控)。 目前激光雷达的原始数据还主要是点云数据,对于点云数据本身基本需求还是:低误报,低漏报。测距300米,角分辨率0.05°,已经可以满足基本的L3能力需求。 激光雷达算法一般分为“信号处理”和“数据处理”,其中“信号处理”是指将ADC数据转化为点云数据,“数据处理”是将点云处理成目标。目前“信号处理”一般都是在Lidar中进行,“数据处理”是在域控中进行。
5. 激光雷达点云处理算法会布置在域控吗?有什么优势?如果布置在域控,对于通讯、域控有哪些新的需求? 如果题目中“点云处理算法”是指的“信号处理”,个人认为短时间内不会放在域控。原因是: 1)“信号处理”一般需要针对Lidar信号的特殊的硬件计算单元,域控中目前一般并不会预留针对Lidar“信号处理”的计算模块,因此,计算效率未必比放在Lidar中更高; 2)高线束的激光雷达点频密度已超过1200万点/秒,传输点云信号对于千兆以太网已经有相当大的挑战,如果更换为传输更为前端的ADC信号,目前通信带宽无法支持; 3)域控的融合模型中,目前仅支持到点云级别,对于ADC级别的融合,目前并未看到有相关研究,技术层面并不支持;
不过也有些厂家在前端做和其他传感器之间的“前前融合”,例如大疆的激目系统。 2024年3月,大疆车载发布“激目系统”,该产品集成了大疆三目、惯导和激光雷达。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71g3w" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-16d4696b7526220693819a602fd0f05d_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="955" contenteditable="false" data-ratio="0.6861111111111111" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 根据大疆的介绍,该系统的主要特点是:
实现降本。激目系统的激光雷达+摄像头的成本,比传统的分立激光雷达和摄像头成本更低(估计低30%~40%)。
“激目系统”的摄像头和Lidar只需要一次标定,就可以准确同步图像和点云信息,相对传统分立方案,标定时间更短,并且精度更高。
由于内部传输速度更快,可以将摄像头和Lidar的数据做更深度的融合,即“前前融合”。硬件设计整合激光雷达和摄像头,由中央域控芯片替代激光雷达主控芯片,激光点云处理软件可随智驾软件OTA;
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7958" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-0bc86f7c54cb17ac40c13cac2e592874_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1554" contenteditable="false" data-ratio="0.35555555555555557" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 资料来源:大疆车载,国投证券研究中心
6. 整车有哪些功能,在有激光雷达的情况下能做的更好?其原因是什么?(比如AEB,纯视觉对于特定对象识别能力短时间内无法快速提升,通过激光雷达点云可以快速增加识别率?其他功能,例如CDC等,是否也有类似情况?) 由于激光雷达在角分辨率、点云密度、测距精度、黑暗天气适应性等方面的优势,在下面功能可以提升性能。
AEB:降低误报。通用障碍物(包括异性物)识别能力更强,暗光环境下可用性更强。
泊车:特殊车位识别,SLAM,小目标精确检测降低泊车碰撞。
等等。
7. 从域控激光雷达处理算法的角度,最关心激光雷达的哪些参数? 1)基本检测性能:例如测距范围和精度、FOV、角分辨率、盲区、点频、帧频、Pattern等; 2)误报率、天气适应性、抗干扰等等, 详见:《雪岭 · 激光雷达常见点云异常场景分析》 ; 3)其他还有包括时间同步精度、丢帧率、通信协议等等。
8. 主机厂应该如何做激光雷达的选型,有什么需要重点关注的地方? 和其他电控零部件类似,主机厂主要关注3个方面: 1)性能高:见上一个问题中提到的激光雷达性能。另外还有尺寸、安装方式、物理接口、工作电压、功耗、功能安全、耐久寿命、工作存储温度、防护等级、重量。 2)价格低。 3)质量保证和供货能力强:车规认证、完善的质量管理体系(16949)、足够产能的产线、PPM等。
当然,还有一些潜在的关注点,例如:量产经验、产品出货量(成熟度)、团队规模和资质、资金储备、现金流状况、企业经营状况、合作历史等等。 当然,还可能有:公司之间的关系,老板之间的关系。。。
(二)芯片 1. 头部Lidar公司都在自研雷达专用芯片,自研芯片的未来发展趋势是怎么样的? 自研的芯片比较多,只介绍一下重点芯片。 1) 发射芯片 激光雷达发射器的发展路径如下图所示:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7kxr" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-9f3c4ed93f43e1370ee862492761adbc_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1818" contenteditable="false" data-ratio="0.5736111111111111" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 多层VCSEL 激光器的发光功率密度得到了大幅提升,凭借在成本及性能方面的优势, VCSEL正逐步取代EEL 。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71vfc" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-ebd0125417629a252bedaac4562d330c_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1080" contenteditable="false" data-ratio="0.5291666666666667" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> EEL和VCSEL的指标对比:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71l8n" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-13f2775271d4b792a8c83fad57f0cca7_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1080" contenteditable="false" data-ratio="0.6055555555555555" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 而VCSEL根据排布方式的不同,又分为单点VCSEL(点光源),线阵列VCSEL(线光源)以及面阵列VCSEL(面光源),可以大幅减少VCSEL器件数量,降低成本,减少走线,降低系统复杂度,提升良率。不过,VCSEL集成度越高,散热挑战也越大。
如下是单点VCSEL和线阵列VCSEL的对比:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71tn7" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pica.zhimg.com/50/v2-286811c5923a52842bfac2f69f072fcd_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="972" contenteditable="false" data-ratio="0.42916666666666664" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 由于半固态激光雷达有机械扫描机构,因此VCSEL线光源就可以满足发光需求,是目前半固态雷达的主流光源方案。 而Flash纯固态激光雷达没有机械扫描机构,需要更多的光源数量以覆盖足够的FOV,因此大多采用VCSEL面阵列。 2) 接收芯片 激光雷达接收器的发展路径如下图所示:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7ivb" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-d74294a9090d46347644ff7370aa891b_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1895" contenteditable="false" data-ratio="0.5111111111111111" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 在905nm路线下,SPAD / SiPM替代 APD 已成大势。 SPAD芯片可以集成TDC、TIA、AMP、ADC等大量后端电路,能够降低对SoC和FPGA的算力需求。 SPAD的研发门槛很高,目前市面上真正能够做到车规级的SPAD传感器,只有安森美的Padion SPAD和索尼的IMX459等少量产品。而在中国自主品牌阜时科技、灵明光子、芯辉科技、宇称电子等也在布局研发车规SPAD。 其中,索尼IMX459是目前激光雷达应用最广泛的SPAD SoC,该芯片在2021年发布,其分辨率为597×168,SPAD间距10μm,PDE达到24%。 索尼SPAD采用背照式像素结构、堆叠结构和Cu-Cu连接等技术。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix72cg" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-d2758dbab393eade0dc4801052a371f9_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1151" contenteditable="false" data-ratio="0.34305555555555556" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:Sony
索尼的下一代SPAD是IMX479,探测效率(PDE)高达50%,据说已经在华为和禾赛内测,并且有了Demo样机。
未来,SPAD芯片有可能集成度越来越高:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71zd3" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-3d37a6fd60182c43671f46a290f33a5c_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1017" contenteditable="false" data-ratio="0.5638888888888889" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 来源:禾赛科技招股书 3) 处理器
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7t54" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-248a8c4b370e8a5f395b240584a1f4c2_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1600" contenteditable="false" data-ratio="0.5625" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:Yole,《Lidar for Automotive 2024》 <span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix74b7" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-f441c63dcaa9dbf9ef28799dbb619e08_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="920" contenteditable="false" data-ratio="0.5652777777777778" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:Yole,《Lidar for Automotive 2024》
2. 发射芯片已经有国产量产的,接收芯片目前国产替代的进度怎么样? 接收芯片目前国产进度比较快的是 灵明光子、阜时科技等 。
其中,灵明光子的SiPM产品已经供货给国内几家头部的Lidar公司,出货量已经达到KK级以上。
对于车载SPAD面阵产品,国内厂商已经有产品在跟客户深入合作,在24Q4~25Q1会有更多的国产产品推出,可能2025年会是国产SPAD大面阵芯片上车的元年。
3. 某些SPAD芯片在进行对射实验时会烧坏,可能的原因及解决方法有哪些? 某些SPAD的泄压电路使用的是MOS管,当存在过高的偏压时,MOS管被反向击穿,造成烧坏。
4. 自研SPAD芯片的主要挑战有哪些?PDE、DCR等参数如何测试? SPAD芯片的主要挑战:
【待补充】
SPAD参数测试方法:
PDE、DCR的测试方法参考:《How to measure – Characterization of SPAD-based detectors》,OSRAM Georg Roehrer,June 3, 2024,SPAD Sensor School, ISSW 2024, Trento, Italy
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7azi" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-1042af9526cbd71271eee3db71271eec_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1243" contenteditable="false" data-ratio="0.5291666666666667" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span>
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix78rs" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-72295cb4d674d53f3b96cda349a53cbc_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1045" contenteditable="false" data-ratio="0.6263888888888889" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 该文章原文请联系maxhnnl。
5. IMX459的距离分辨率较低,有什么方法可以提升距离分辨率? 激光雷达指标中,对于“距离分辨率”提到的较少,“距离精度”提到的较多。
距离分辨率是指能够将相同角度、相同速度两个目标区分出来的最小距离。
采用SPAD方案的Lidar一般采用电平采样累和的方式(SST,Synchronous Summation Technique)进行测距,这种方式对SPAD的deadtime较为敏感,deadtime越小,分辨力就越高。目前IMX459的deadtime是6ns(论文中),实际使用时,为了避免较为严重的jitter,一般deadtime是10ns左右。此时,理论上距离分辨率大于10ns*光速/2=1.5m。
提升距离分辨率的方法可以考虑减小SPAD的deadtime,以及通过echo估计算法。
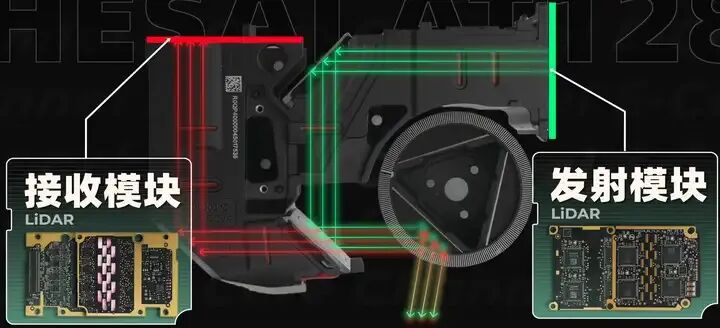
(三)光学、结构 1. 转镜的光学设计相关原理是怎样的? AT128 是比较典型的转镜方案。原理如下:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7qux" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-6ba8dc84bd96d107509329b6d2866b0d_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="2000" contenteditable="false" data-ratio="0.5625" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:Yole
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7x3e" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-d10fbf7087d0e279f2539948d83dbb0e_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1658" contenteditable="false" data-ratio="0.5208333333333334" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道
AT128采用一维转镜方案,在水平方向上使用转镜扫描,垂直方向上使用128个激光器做电子扫描。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix759" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-60be0d02aa21695886ae1d6cea31d08d_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1709" contenteditable="false" data-ratio="0.45555555555555555" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道
AT128一共有128个VCSEL激光器,每个激光器依次点亮,单个通道的点亮时间约十几纳秒。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7myc" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-ac97a656fc3140a5f28a0602abf68423_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1219" contenteditable="false" data-ratio="0.7513888888888889" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道
VCSEL细节:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7200a" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pica.zhimg.com/50/v2-473ea7219ef8e6db45bf4f316eb1812f_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1360" contenteditable="false" data-ratio="0.3875" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道
AT128采用SiPM(硅基光电倍增管),如下图中的粉红色区域。SiPM分为16个探测模组,在水平方向上错开,错开的原因是为了补偿水平方向上的角度差。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix717rh" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-5904449045486e5a56394b154b7b0d63_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1558" contenteditable="false" data-ratio="0.5375" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道 SiPM细节图:
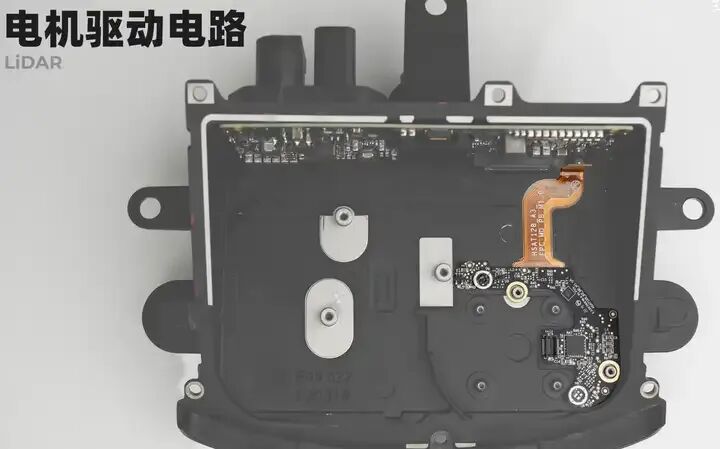
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7sqc" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-9537d9460ea547e20272534338ffd485_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="632" contenteditable="false" data-ratio="0.5316455696202531" data-w="632"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道 禾赛自研了模拟前端芯片,一共8片,将SiPM的信号进行读取、解析和放大。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71l1x" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-3587a62b059b38471af2ae864d5824f0_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1319" contenteditable="false" data-ratio="0.6361111111111111" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix75sh" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-e3667fe24b6162e63f363058bf79a742_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1034" contenteditable="false" data-ratio="0.5875" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道 <span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7rn7" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-e224d6fbf36c74256b561ca1b58b6209_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1452" contenteditable="false" data-ratio="0.5083333333333333" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道 信号处理模块和雷达背板之间是通信模块:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71327" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-3b65f62fabe3e7f252d42aac781556b9_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1631" contenteditable="false" data-ratio="0.49722222222222223" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道 <span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7117m" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-7e2f15cfbfe6df30c8de4843de6c5478_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1917" contenteditable="false" data-ratio="0.4888888888888889" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道 <span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71p08" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-32014b12161e4a37e14c1d3a7e1531d1_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1390" contenteditable="false" data-ratio="0.6236111111111111" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道 <span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71e69" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-dc57bb87d6b4504e0f39fcf254ba9314_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="582" contenteditable="false" data-ratio="1.3608247422680413" data-w="582"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:绿芯频道 2. 同轴光路的收发端镜头的光学设计方案是怎样的? 【来自Jessica老师】 同轴光路的收发端镜头设计通常涉及发射端和接收端,同轴光路需要同时在同一轴线上完成发射和接收。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71l7y" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-4c67c28f61299ad207bb77ff35a23151_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="690" contenteditable="false" data-ratio="0.47246376811594204" data-w="690"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 如下以同轴光路(或部分同轴光路)激光雷达为例:
发射端光学设计
1)扩束镜:激光源发出的光通常需要经过扩束镜来扩大光束直径,以减小发散角并提高照射距离。 聚焦透镜:为精确控制发射光束的焦点位置,需要一个或多个聚焦透镜。这些透镜可以是单个透镜或复合透镜组。 2)分束器(分光镜):在同轴光路中,通常会使用分束器(如部分反射部分穿透的镜镜片或偏振分束器)来分隔发射和接收路径。发射光通过分束器后,会沿着预定的方向前进。
接收端光学设计
1)收集透镜:用于收集从目标反射回来的光,并将其聚焦到探测器上。 2)分束器(分光镜):与发射端相同,接收端也需要使用分束器来引导反射光进入收集透镜。 3)滤光片:通常会在探测器前放置滤光片,减少背景光干扰,只允许特定波长的光通过。
光学设计考虑因素
1)共轴性:确保发射和接收光路共轴,这样可以精确地对准目标。 2)光束控制:通过适当的光学元件设计,控制发射光束的形状和强度分布。 3)背景抑制:通过滤光片和其他手段降低背景光干扰。 4)聚焦精度:确保收集透镜能够准确聚焦反射光,提高接收信号的质量。 5)热稳定性:设计时需考虑温度变化对光学元件的影响,确保在不同环境下光学性能稳定(激光雷达中光学件一般需要与结构件搭配使用,需考虑到二者的热膨胀系数)。 6)机械稳定性:确保整个光学系统在振动或冲击等条件下仍能保持对准。
3.在转镜式激光雷达中,由于转镜不是绝对的匀速,会导致点云有可能左右晃动,有什么好的解决方法吗? 使用高精度的码盘,使用角度触发激光器发光的方案。只有当转镜转到特定的角度时,才会触发激光器发光。当然,这需要两个前提条件:
1) 对转镜的运动实现闭环控制,至少知道何时转到何角度;
2) 提前标定,明确角度触发发光的指令后到实际的激光器发光所需要的时间;
4. “同轴光路”和“旁轴光路”的优劣势分别有哪些? 【来自Jessica老师】 "同轴光路"和"旁轴光路"通常是在光学设计及其相关应用中会提到的概念,定义是:
1)同轴光路:入射光与出射光共轴的光路系统,即光线沿着同一轴线或平行于同一轴线传播。市场上已有的禾赛AT128即为部分同轴激光雷达产品(探测光束在光发射器和扫描器之间, 和回波在扫描器和接收器之间光路至少部分同轴)。 2)旁轴光路:入射光与出射光不在同一光路上,而是相对于某个偏转轴偏移的光路系统。
装调容易:光学元件在同一轴线上,更容易实现和调整,对准相对容易。
空间限制:对于一些需要紧凑设计的应用,同轴布局可能会受到物理空间的限制。
杂散光干扰问题:同轴收发光路可能会增加杂散光对回波光造成的干扰,尤其是在需要高对比度成像的情况下。
灵活性受限:对于复杂的光学处理要求,同轴配置可能不够灵活。(个人观点:就目前的激光雷达而言,这点影响感觉不大)
旁轴光路优势:
光路设计灵活性高:可以更好地适应不同的应用场景,特别是在需要改变光束路径或者进行复杂操作的情况。
减少杂散光:通过避免光线直接被反射回发射端,可以有效减少杂散光和鬼影现象。
空间利用效率:旁轴设计可以在有限的空间内实现更复杂的光学功能。
旁轴光路劣势:
对准复杂:各个光学元件不是共轴的,因此对准过程更加复杂且耗时。
成本较高:旁轴系统的构建通常需要更多的光学元件和机构件支撑,会增加系统成本。
可参考如下专利: 专利号:CN 114624674A《激光雷达》 专利号:CN115267799A《分光装置和激光雷达》 专利号:CN118311542A《激光雷达的光扫描系统及激光雷达》
5. 转镜方案中“点光斑”和“线光斑”的优劣势分别有哪些? 1)转镜+线光源
只有1个转镜实现水平方向的扫描,垂直方向使用线光源。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7127j" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-e83efb84d5ca70124cabca06e0434f03_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="767" contenteditable="false" data-ratio="0.6888888888888889" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 扫描示意图:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix713u2" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pica.zhimg.com/50/v2-0928939c48cf776936d03bf7b6d139de_720w.gif?source=2c26e567" class="origin_image zh-lightbox-thumb" width="600" contenteditable="false" data-ratio="0.5633333333333334" data-w="600"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 代表产品有华为D2、D3,整合多个半导体激光器的光源,经过光学器件的整型成为均匀的线光斑。 禾赛AT128不是“线光源”,更准确的说,应该是“128个点光源”。
2)转镜+振镜+点光源
同时采用转镜+振镜,实现水平方向和垂直方向的扫描。 其扫描原理如下:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71deb" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-018c0707c2817716abfadacc0e4ae81c_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="744" contenteditable="false" data-ratio="0.7083333333333334" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 扫描示意图:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71fx3" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-9ec771fb106baad4e66eaae08c296fab_720w.gif?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1079" contenteditable="false" data-ratio="0.5625579240037072" data-w="1079"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span>
3)优劣势对比
转镜+线光源方案: 优势:
1)线光源本身的分辨率很高(可认为是无限),如果需要增加垂直分辨率,只需增加接收端的分辨率,无需增加激光器。 2)转镜只需保证 匀速旋转 即可,无需变速或其他特殊控制,整体难度不高。 挑战:
1)干扰光数量更多。由于光路的可逆性,点光源路线的激光雷达,只有与当前发射光线角度近乎完全相同的外界光线才能进入接收端,而对线光源激光雷达而言,当前扫描到的一条竖线上的外界光线都可以进入接收端,显然干扰光的数量远多于点光源路线。 2)由于线光斑的能量更为均匀/分散,接收端需要使用更为灵敏的SPAD/SiPM,更容易受到阳光的干扰。 转镜+振镜+点光源方案: 优势:
1)灵活度较高,通过改变振镜转速与激光器点频,实现灵活的ROI; 挑战:
1)扫描的点云pattern不规整,在FOV边缘区域变形较大;
6. 转镜激光雷达电机的构造、原理和特点? 【待补充】
7. MEMS激光雷达与转镜式激光雷达,它们之间点云测距精度是否存在较大差异? 测距精度差别并不大:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix720l1" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-ab01015bb74ad1f45e456fcbcd720987_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1572" contenteditable="false" data-ratio="0.45416666666666666" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> (四)成本 1. 目前整机的成本组成情况是怎样的?sony459成本大概多少? 转镜类激光雷达成本构成参考:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix718ul" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-9907fb174e8bbd7f5619f5ac187cf16c_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1093" contenteditable="false" data-ratio="0.5194444444444445" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span>
光学部件占整体成本的30%,转镜是其中成本最高的部分。
主控芯片的FPGA芯片较贵,但随着转向自研SOC,成本有望降低。
发射端芯片成本相对较低,国内企业在这一领域有所发展。
随着产量的增加,光学部件和芯片成本预计将进一步降低。
1)光学部件:
转镜:最昂贵,这部分的成本占据了光学部件总成本的一半。国内供应商主要是永新光学、舜宇光学和富兰光学。
接收镜头:由于需要收集光线,口径较大,因此镜头的成本较高。
视窗片:激光雷达的保护窗,它不仅仅是一个简单的罩子,还在表面镀有一些ITO导电膜,具备加热功能,可以保持内外温度一致,以提升光学性能。
其他零部件:如反射镜、滤光片等,这些零部件的成本较低。
禾赛、图达通的光学部件主要由永新和舜宇供应。华为的光学部件主要使用宇瞳光学的收发镜头。速腾聚创主要使用MEMS方案,主要供应商是舜宇光学和亚洲光学。Innoviz主要使用永新的光学部件,而法雷奥也与国产企业合作。目前,光学部分市场主要由国产供应商占据。
2)主控芯片: 之前主要是用高性能FPGA,但现在各家都在自研主控SOC。标准化的SOC可以显著降低成本。目前来看,单个芯片的价格仍然很高,仅次于光学部件。 目前量产产品主要使用赛灵思的FPGA,随着雷达企业越来越多地自研主控芯片,FPGA的使用越来越少。因此,相关成本也在逐渐降低。
3)接收端芯片: 接收端芯片大多使用安森美、索尼或滨松光子的芯片,但这些也相对昂贵。目前国内企业难以参与这一市场。
4)发射端芯片: 目前主要依赖海外供应商。例如,禾赛之前使用的VCSEL是Lumentum的产品,速腾则主要使用欧司朗的EEL。国产VCSEL厂商主要包括长光华芯和纵慧芯光。禾赛等厂家也在计划自研VCSEL,发射端芯片的成本降低也在快速降低。 sony459成本大概多少? 看各家拿货能力,大概在15~25(美元)。
2. 各家头部激光雷达单台的生产制造费用大概是怎样的? 生产制造费用和结构复杂程度、产线设计、出货量等关系非常大。、 公开信息较少,可以参考速腾和禾赛等企业的季报或者年报
(五)软件 1. 激光雷达的时间同步是怎么做的? 通常都是采用gPTP协议 。
gPTP和PTP都是比较常见的时间同步方案,看智驾方案的整体考量。一般域控是时间同步的master,激光雷达是slave。
2. 激光雷达和相机做时间同步时,两者的检测时刻是否一定要相同? 并不需要,激光雷达自身将时间戳打好即可,激光雷达和相机各自保持足够的帧频即可。 一般情况下激光雷达打时间戳的时刻,最理想的是取发波开始时间和接收到回波时间的中间时刻,在要求不太高的情况时,可以直接取发波时刻或者收到回波时刻。
激光雷达帧率一般为10FPS,相机一般为30FPS。实际应用中,最好是相机每3帧和激光雷达做一次对齐,可以更好地应对运动畸变的影响。
3. 激光雷达和毫米波雷达在信号处理和目标跟踪方面,有哪些异同? 1)对于“信号处理”
由于测量方式的不同,信号处理差异较大。 激光雷达按照测距方式,分为dToF 和iToF 两种类型。dToF主要是脉冲编码和解码、飞行时间解算,另外考虑到不同的扫描方式,算法还有部分区别。 dToF激光雷达测量原理:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71xyq" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-b94a9b70f5e751c099a602346f924165_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="700" contenteditable="false" data-ratio="0.5228571428571429" data-w="700"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> iToF主要有AMCW,FMCW,PMCW ,RMCW等,有的通过相位解算,有的通过频率解算。dToF和iToF之间的信号算法差异很大,iToF里面不同类型差异也很大。 AMCW激光雷达测量原理:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7zoy" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-b272afadd567ab7b658b0230ff11696e_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="700" contenteditable="false" data-ratio="0.5714285714285714" data-w="700"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> FMCW激光雷达测量原理:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7ux1" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-8dd8c6ee49e1298407cac09ae3f04548_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="700" contenteditable="false" data-ratio="0.5485714285714286" data-w="700"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> PMCW激光雷达测量原理: LiDAR上PMCW就是借鉴了微波的概念,发射调制加上Barker码,回来接收做自相关,增益会比FMCW拍频带来的增益低,不过对光源要求低很多,功率还可以提高。对调制周期内的信号做STFT,可以得到Doppler frequency,然后解算速度。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7t0d" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-4f0d1853a4f7ae34a15e1abdd101dee8_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1879" contenteditable="false" data-ratio="0.30972222222222223" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> RMCW激光雷达: Ramdom Modulation理论上可以调幅度、调相位,但是多用于调相位进行相干探测。澳大利亚初创激光雷达公司 Baraja 是 RMCW技术的典型代表,该公司采用 RMCW 技术结合棱镜色散光谱扫描技术研制出型号为 Spectrum HD的车载级雷达。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix723kt" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-9e8fda47f8168a899c09824d446d846b_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="819" contenteditable="false" data-ratio="0.6875" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:《Simulating correlation waveforms of random modulated continuous wave LIDAR》 毫米波雷达主要分为FMCW和PMCW类型,FMCW是目前主流方案,通过频率解算,和FMCW激光雷达原理类似,PMCW使用相位编码的方法进行解算,两者是完全不同的信号处理算法。 FMCW毫米波雷达:
PMCW毫米波雷达:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7hu8" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-89708c24b81fc7d8731bb9659f5824b4_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="552" contenteditable="false" data-ratio="0.5634057971014492" data-w="552"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> FMCW和PMCW的原理对比:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix720ri" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-d1ddecb7195a679d6e11998f7a508ce9_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="722" contenteditable="false" data-ratio="0.4361111111111111" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 优劣势对比:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71d8e" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-749e763b19e9e3e22c9dbaf608a3fc8d_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1650" contenteditable="false" data-ratio="0.5402777777777777" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:中科云杉
2)对于“数据处理”
“数据处理”主要做原始点之后的聚类、跟踪、航迹管理、模式识别。 毫米波雷达和激光雷达之间的方法论类似,不过由于激光雷达点云密集,dToF激光雷达没有速度信息,因此在具体算法的选择上,以及参数设置上,有一定的区别。
4. 激光雷达如何作为真值系统,训练毫米波雷达、视觉的检测模型? 可以参考亮道、速腾等公司的激光雷达真值系统。
5. 激光雷达、摄像头和毫米波之间如何做数据融合?当前有哪些主流方案? 【待补充】
6. 采用SPAD接收器的激光雷达,其点云处理算法架构是怎样的,一般需要怎样算力的处理器? 【待补充】
7. 激光雷达脏污检测的原理是什么?难点有哪些? 主要原理是检测是否有过多的近距离回波。
实际方案中,一般会将整个FOV分为若干个子区域。每个子区域中,基于存在赃物的点的数量判断该区域的脏污程度。当一定数量的子区域存在一定程度的脏污时,传出激光雷达窗口片脏污的信号。
难点:
a) 盲区内的点测距精准度差,所以最大的难点在于对近距离回波的判定;
b) 与窗口片外附水和内凝露的区分;
c) 脏污对实际探测能力的影响,即探测能力下降到什么程度时需要报出。既不能不报,又不能报的过于敏感。
(六)标定和产线 1. 激光雷达内参标定是如何进行的?标定哪些参数?如何进行标定? 大致有以下几类:
盲区标定:暗环境下进行,去除底噪和前导噪声的影响;
回波信号标定:通过收集不同反射率板在不同距离下的回波信号,对测距能力和反射率进行标定;
拼接标定(MEMS独有):分别对不同通道的测距进行配准,保证拼接时相邻通道点云不会分离太多;
温度补偿标定(MEMS独有):温度不同会影响MEMS本身的扫描能力,需要在不同温度下对其进行标定;
2. 激光雷达产线标定和动态标定的原理是怎样的? 【待补充】
3. 激光雷达、摄像头和毫米波之间如何做联合标定? 因为这三种传感器标定物不一样,而且可能会有互相遮挡的情况,因此很多时候并不是联合标定,而是独立分开标定,不过有可能在同一工位进行。 对于工厂标定来说,一般有两种操作方法: 1)三个传感器在一个标定工位,但按照时序分别标定; 2)激光和摄像头一个标定工位,毫米波自己一个工位(需要周边环境有吸波材料);
4. 激光雷达作为新器件,对主机厂量产产线带来了哪些影响?相比其他ADAS传感器,是否有特别需要注意的事项? 可能需要注意的点: 1)表面划伤。会导致退货等(如果Tier1有出厂照片记录,一定程度上可以排除退货风险,这种情况会被设置为废料)。 2)表面贴膜未撕下。此时会导致功能受限,需要设置合适的工序,合适的时刻去掉贴膜。 3)如果放在车顶的地方,有时还会涂导热胶,有些胶还需要特定温度涂胶,此时还需要增加保温箱。
另外: 1. 激光雷达主机厂EOL标定,一般标靶占据的空间会比较大,难以与现有的Camera、radar的EOL工位复用,往往需要新建工位。
2. 为了满足整车防水性能,激光雷达往往需要与外饰件固定的比较紧密,直接上主线装配会花费比较多的时间;但又难以像camera那样A+B供货。需要在装配工艺设计上花些功夫,一般是在副线和外饰件装配成一个分总成后,再到主线上进行装配。
(七)极端场景和抗干扰 1. 路上装激光雷达的车多了之后,如何避免相互干扰?是在传感器端还是在域控算法中解决干扰问题? 当有多个激光雷达相距较近时,不同雷达发射和接受脉冲容易相互干扰,从而出现干扰点云。该现象对于采用dToF体制的激光雷达更容易出现。
解决方案:
1)采用光随机编码,通过校验分辨干扰信号,从而滤除错误数据。其他还包括增加滤光片,偏光片,调光俯仰角,分时收发,调节占空比等等方法,也都可以降低被干扰的概率。 2)采用iToF测量方式,即激光相干技术,例如FMCW激光雷达。相干激光雷达采用回波与本征光相互干涉来检测回波,环境中其他光(包括太阳光,其他激光雷达的光)很难与本征光产生干涉,也就不会被检测到,不容易产生噪点。 需要在激光雷达传感器侧进行干扰抑制。 详见:《雪岭 · 激光雷达常见点云异常场景分析》
2. Lidar在雨、雾、雪、尘土等条件下的表现如何? 应对的难点在哪里?有哪些应对方案? 详见:《雪岭 · 激光雷达常见点云异常场景分析》
1)雨雾干扰
当雨量不大时,在雷达视场内会出现大量噪声点云,同时,激光雷达的测距性能发生衰减。 主要原因是激光雷达光束打到雨滴或者雾滴上,激光发生反射和吸收,造成点云的异常增加或者点云的消失
如下图所示,下雨导致了大量噪点(白色点):
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7kqc" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-38011bf483d62dc9fd91bc5b92eeddf0_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1568" contenteditable="false" data-ratio="0.3736111111111111" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:Chiyu Zhang, Ji Han等《Detecting the Anomalies in LiDAR Pointcloud》 当大雨或者暴雨时,点云密度和测距范围大幅下降,点云基本无法反映有效目标:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix712cs" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-929cebbe9b09b89a98ced02920f234c6_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="942" contenteditable="false" data-ratio="0.4041666666666667" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:Chiyu Zhang, Ji Han等《Detecting the Anomalies in LiDAR Pointcloud》 雾的影响和雨水类似。一般来说,在雾天不严重的情况下,如轻雾(能见度为1km-10km),雾天并不会明显影响激光雷达点云。但是,当雾天能见度越来越低后,激光点云的透过率会下降,雷达视场内出现大量噪点(如下图白色点)。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71rjh" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pica.zhimg.com/50/v2-72559eeb64df6b4bf737bf3ca613d717_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1572" contenteditable="false" data-ratio="0.34444444444444444" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:Chiyu Zhang, Ji Han等《Detecting the Anomalies in LiDAR Pointcloud》
轻雾和浓雾时,对于点云的影响对比:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71l9s" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-50b6cdd262bde8e29baba2c1d66f4802_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="968" contenteditable="false" data-ratio="0.925" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:《Perception and Sensing for Autonomous Vehicles Under Adverse Weather Conditions: A Survey》 应对方案:
通过反射特性(反射率、方向、强度)、尺寸、形状等特征来识别目标,通过记录目标波形,来识别被检测目标是否是雾或者浓烟,以进行滤除。
激光雷达光束打到一些物体上会发生透射,透射的光再遇到物体还会发生反射,这样激光雷达发射一束光可以接收到多次反射光,采用相应的算法对多次发射光进行处理,就是多回波技术。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix71f8d" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-1df6e5cdc57771b7f5504a93cc5f399d_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1016" contenteditable="false" data-ratio="0.3277777777777778" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 如果在雨雾环境中,激光可以穿透雨雾,最后打到障碍物上并反射,采用最后一次回波就可以把雨雾滤除掉。 不过,多次回波的作用是只用于较小的雨雾,如果雨雾很大,导致激光完全无法穿透雨雾,则依然无法有效检测。
目前市面上的激光雷达通常会支持单回波与双回波两种模式。单回波模式:一般有两种选择,即“最后回波”和“最强回波”。“最后回波”是指雷达只输出最远的一个回波;“最强回波”是只输出最强的一个回波。双回波模式:通常是“最后回波”和“最强回波”,也可能有别的模式。开启双回波的激光雷达点云密度通常是单回波的2倍。
下图是不同波长的激光雷达去水系数谱(Water extinction coefficient spectrum):
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7sur" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-38923e3e8972bfbb83755cc65f7d8404_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1202" contenteditable="false" data-ratio="0.4388888888888889" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:Yuxiao Zhanga等,《Perception and Sensing for Autonomous Vehicles Under Adverse Weather Conditions: A Survey》 相对于905nm的激光,1550nm的激光更容易被水雾吸收。 正是由于该特性,1550nm激光对人眼安全影响更小(激光还没有打到视网膜,就被眼球里面的水给吸收了)。但是,同时1550nm激光雷达在雨天的表现,一般会比905nm激光雷达要差一些。
对于线扫描激光雷达来说,发射光是一个细小的光束,对于光束的路径上的雨滴等颗粒比较敏感,容易形成噪点。 Flash激光雷达发射面阵激光,雨雾颗粒只反射一小部分激光,通过滤波算法,可以较为容易将雨滴、灰尘颗粒等的噪点滤除掉。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7hym" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-2d1d28ffe0b21f970c5175d6c97de211_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="802" contenteditable="false" data-ratio="0.9388888888888889" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:网络
2)粉尘和雪干扰
粉尘和雪是固体,比雨雾更容易反射激光,从而形成更为明显的噪点。
主要是使用去噪算法,进行滤除。主要分为点云滤波算法、波形识别算法、以及基于深度学习的去噪算法。 其中,点云滤波算法常见的有体素滤波、高斯滤波、双边滤波等方法,但是在对于一些特定场景下的点云噪声,这些传统算法往往起不了太大效果。 波形识别算法(和雨雾处理类似),主要是依据经验,分析噪声点云出现的方位、反射率的大小,通过这些信息设置阈值过滤点云; 目前基于深度学习的去噪方法也越来越受到大家重视。通过开发基于语义信息的噪声滤除网络,例如基于体素的CNN方法、CycleGANs等等,具体可参考:Mariella Dreissig等《Survey on LiDAR Perception in Adverse Weather Conditions》。
基于CNN 的点云去噪网络的效果如下:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix719uq" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-7a131e2684c24c9ae78b753b00795523_720w.gif?source=2c26e567" class="origin_image zh-lightbox-thumb" width="3030" contenteditable="false" data-ratio="0.3795379537953795" data-w="3030"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 左图:input,中图:CNN网络识别噪点,右图:去噪之后的点云图片来源:CNN-based Lidar Point Cloud De-Noising in Adverse Weather, https://github.com/rheinzler/PointCloudDeNoising
3. 对于flash激光雷达,串扰问题解决的思路有哪些? 详见:《雪岭 · 激光雷达常见点云异常场景分析》
在薄膜晶体管液晶显示器中,通常将串扰定义为整个屏幕中某一区域的显示会受到另一区域的影响,而造成画面失真的一种显示异常的现象。 如下图所示,黑色方块的上下区域的亮度,被黑色方块影响:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7g7" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://pic1.zhimg.com/50/v2-a08788fa8ee46c74912493c9b5114b40_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="537" contenteditable="false" data-ratio="0.8342644320297952" data-w="537"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 类似的,在激光雷达中,接收阵列中的一个雪崩事件在像素内触发时,大量的雪崩热载流子溢出,发射出900-1700nm波长范围内的近红外串扰光子。这些串扰光子直接或者间接的被相邻的像素检测到,从而导致串扰。如下图所示(接收阵列以SPAD为例):
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7vy1" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-9489a661dc8932ff167343a4b20f682f_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1004" contenteditable="false" data-ratio="0.6097222222222223" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 串扰会降低信噪比(SNR),并降低成像的空间分辨率。 串扰强度随着像素间距的减小而增大,从而限制了SPAD阵列可达到的像素密度。
解决方案
一般情况下,通常采用在相邻像素间刻蚀隔离沟槽,以及串扰滤波层和背面金属化,来阻断串扰光子的传输链路。 利用聚焦离子束(FIB)蚀刻和铂填充沟槽的方法可以抑制最近相邻像素间60%的串扰。不过引入的刻蚀,以及倍增区的暴露侧壁和分离损伤,会降低接收器件的可靠性、稳定性,同时还可能会增加暗电流,从而导致高的暗计数率(DCR)。
在国家自然科学基金项目(批准号:61774152)资助下,中国科学院半导体研究所光电子材料与器件重点实验室杨晓红研究员团队在InGaAs/InP单光子雪崩二极管阵列串扰抑制领域取得进展。研究成果以“载流子抽取结构在InGaAs/InP单光子雪崩二极管阵列中的高串扰抑制(High crosstalk suppression in InGaAs/InP single-photon avalanche diode arrays by carrier extraction structure)”为题,近期发表于《自然•通讯》(Nature Communications)上。论文链接: https://www. nature.com/articles/s41 467-023-43341-9 他们提出一种在平面InGaAs/InP SPAD阵列中实现高串扰抑制的载流子提取结构(CES)。这个CES是p掺杂通道,通过引导光产生的串扰孔到表面来隔离像素,而不是阻挡光路。 在该工作中,研究团队提出了一种基于电场疏导的载流子抽取结构,在未引入任何刻蚀损伤的前提下实现了大于90%的高效串扰抑制。该载流子抽取结构分布在阵列非像素区域,通过该结构以电场引导的方式将非像素区域的串扰光生载流子抽离有源工作区,实现了阵列像素间串扰和本征噪声的降低,同时还保持了平面型器件的高可靠性和高稳定性。 如下所示:
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix7125g" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-641e291578a1d0d4fdd62ddd7c6463f4_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1231" contenteditable="false" data-ratio="0.6166666666666667" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 图片来源:High crosstalk suppression in InGaAsInP single-photon avalanche diode arrays by carrier extraction structure 结果表明,在间距为100/50μm的阵列中,由于对光电串扰的强烈抑制,串扰抑制效果超过90%。通过减小像素与电子束之间的距离,可以实现更好的串扰抑制。当距离大于12 μm时,即使施加0V的偏置电压,也能有效地抑制串扰。随着距离的减小,需要在CES上施加更高的反向偏置电压,以保证像素和CES独立工作。
<span leaf=""><span textstyle="" style="letter-spacing: 0.5px;"><span leaf="" mpa-font-style="mja1lix81ieu" style="font-size: 16px">&lt;span leaf=""&gt;&lt;img src="https://picx.zhimg.com/50/v2-a7bc0c1c19a5c207305d96d3f520b5ed_720w.jpg?source=2c26e567" class="origin_image zh-lightbox-thumb" width="1028" contenteditable="false" data-ratio="0.9819444444444444" data-w="720"&gt;&lt;img class="ProseMirror-separator" alt="" style=""&gt;&lt;br class="ProseMirror-trailingBreak"&gt;&lt;/span&gt;</span></span></span> 研究团队在理论和实验上验证了该结构的串扰抑制效果,在100 / 50 μm间距的像素中实现了91.52% / 96.22%的串扰抑制效果,为发展低串扰的大规格、高像素密度单光子雪崩二极管阵列提供一种新的解决思路。
除了上面方法之外,还可以考虑通过软件的方法,将激光的发射和接收在空间上相互错开,即不同激光器之间发射的空间范围不一样,或者是时间上错开,来降低串扰的问题。
(八)FMCW雷达 1. 在较高速度行驶过程中,FMCW雷达如何进行点云的逐点畸变矫正、Doppler速度补偿? 【待补充】
2. FMCW雷达是怎样进行内参标定的(Doppler径向速度标定、点云距离标定、 多个激光探头角度分布),依赖什么样的工具? 【待补充】
3. 目前市面上的FMCW激光雷达,在检测性能如何?与主流半固态雷达(如:AT128 、 Falcon) 相比差异较大吗?




















































 左图:input,中图:CNN网络识别噪点,右图:去噪之后的点云图片来源:CNN-based Lidar Point Cloud De-Noising in Adverse Weather, https://github.com/rheinzler/PointCloudDeNoising
左图:input,中图:CNN网络识别噪点,右图:去噪之后的点云图片来源:CNN-based Lidar Point Cloud De-Noising in Adverse Weather, https://github.com/rheinzler/PointCloudDeNoising