GNSS拒止环境是指因信号干扰、物理遮挡或欺骗攻击等原因,导致卫星定位、导航和授时服务不可用或不可靠的区域(),严重威胁着航空器的飞行安全,也是无人机真正走向实战必须要面对的问题。
TMN-300/350系列低成本双光地景匹配+MEMS惯导组合导航系统,是一种通过实时拍摄地面图像并与预存数字地球对比来确定无人机位置的自主导航技术。其核心优势在于不依赖GNSS信号,在电磁干扰或信号屏蔽等复杂环境下仍能保持高精度定位,适合全天候和GNSS拒止场景。本系统结合了深度学习算法,能有效解决异源图像(如卫星图与实时图)的光照、季节差异问题,与惯性导航融合,形成"地景+惯导"的组合导航方案,广泛应用于无人机、巡飞弹等领域。
高集成度,内部集成红外/可见光相机、AI处理计算机、GNSS/MEMS惯性组合;
可预存20万平方公里数字地图和高程信息;
地景匹配适应相对高度范围200-5000米,可定制更大高度范围;
双光融合匹配,深度融合红外辐射与可见光纹理特征,优势互补,提升全天候、全地形匹配精度与鲁棒性;
地景匹配+MEMS惯导,超高性价比,实现飞行过程中抗GNSS干扰/诱骗;
支持接入NAV500系列低成本光纤惯导,可实现GNSS完全拒止环境下的自主起降和全流程飞行;
可无缝接入创衡控制S系列飞控系统;
支持接入Ardupilot开源飞控系统(提供接入软件套件)。


TMN-300/350系列地景匹配/惯性组合导航系统支持红外或双光相机。双光相机的融合匹配技术,通过深度融合红外辐射与可见光纹理特征,实现了多模态感知的优势互补。该技术不仅能显著提升特征匹配的精度与鲁棒性,更能在雨、雾、烟尘等低能见度及夜间弱光环境下发挥关键作用。可在GNSS拒止环境中实现不限时和不限航程的精确导航,导航精度优于(10±1%高度)米。

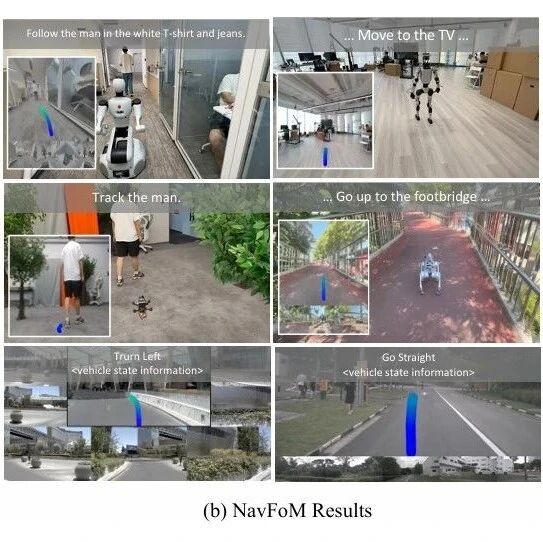
多场景实飞验证
在复杂气象条件下,单一红外传感器易受环境影响,导致图像对比度下降、特征模糊;而可见光相机则面临穿透力不足的问题。双光融合通过算法协同,利用可见光的高分辨率纹理信息与红外对热辐射的敏感特性,构建出更丰富、稳定的环境特征表达。这使得飞行器在复杂气象条件下的感知系统具备更强的环境理解与自适应能力,有效弥补了单一传感器的局限,大幅提升了自主导航可靠性,为全天候、全地形作业提供了坚实的技术保障。
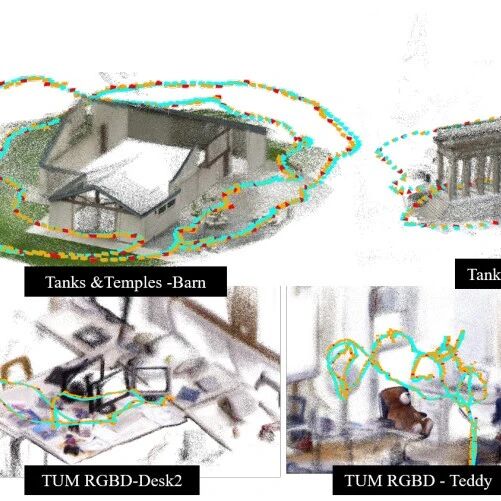
对地高度1200m飞行数据回放
地景匹配/惯性组合导航系统核心优势在于不依赖外部信号,凭借长时自主性、可视性、高精度、抗干扰性、防诱骗、智能化等特性,成为拒止环境下自主导航的理想选择,为无人机飞行提供可靠服务。系统完全自主可控,可根据用户需求进行深度定制。
戈壁滩飞行测试
地景匹配/惯性组合导航系统穿越云雾飞行测试,飞行过程中穿越云雾严重区域出现无法定位的状况,无人机依靠纯惯性导航飞离该区域后,地景匹配系统自行恢复定位并继续飞行,恢复后精度保持在10±1%(高度)米(CEP)。
穿越云雾飞行测试

北京博伦思导航技术有限公司专注于惯性测量与组合导航系统研发、生产的高科技企业。公司核心技术团队毕业于北京航空航天大学,在惯性测量与组合导航技术领域具有十余年的技术积累和工程实践。公司现有导航类产品与市场类似产品相比,极致发挥了惯性器件一次上电稳定性和工程型滤波器一致性技术优势,全谱系产品具有高精度、高可靠、低成本的核心竞争力。