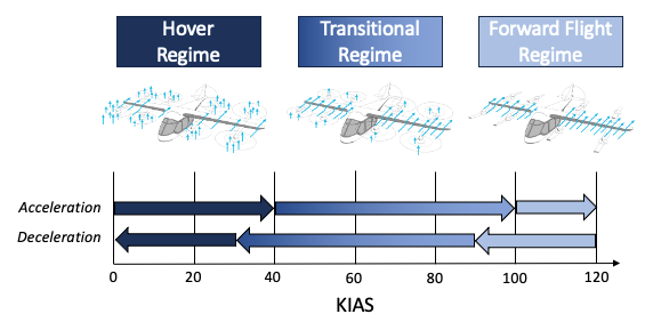
一提起过渡飞行,通常最直接的第一个反应就是复杂且特殊,接下来第二反应则是将过渡和倾转构型的eVTOL紧密相互联系。对于第一个反应复杂或许是正常的,但是特殊不应当是常态;关于第二个反应其实是视觉上的误导,倾转构型的过渡只是更容易在视觉上直视。所以,今天我们就从三个角度来观察一下eVTOL过渡飞行需要直视的一些问题。 1.气动环境的变化 无论是哪种构型只要开展过渡飞行,那就意味着螺旋桨要面临气动环境的变化,为了解决和深刻认识这个问题Joby配合NASA开展全尺寸螺旋桨过渡的风洞测试,帮助更好的理解过渡点的选择,每一次的重新配置都是对原有倾转机构的设计验证;复合翼和多旋翼方面,以Beta和Skydrive为典型,都对升力螺旋桨的桨毂进行了优化设计。 2.控制模式的配置 除了外部气动环境的变化外,过渡飞行也会带来不同控制模式上的切换。有些整机确实通过专利的方式公开过自己针对不同飞行阶段控制模式的分配,但这仅限于标准情况下的SVO配置。然而,对于不同故障模式下和不同飞行性能需求下的模式配置却很少见到公开的技术信息。 3.过渡态的确认 过渡态下的飞行本身不应该是高风险的,所以长期的过渡态飞行验证是有必要的。由于倾转构型在设计上天然的需要重视机构、桨叶、桨毂和变距的设计,所以长期基于过渡态的稳定飞行是有基础挑战展示的,这一点可以通过观察Joby和Vertical的有人驾驶飞行测试验证过程。然而对于复合翼或者是多旋翼的构型,由于不同团队在技术路线或者产品策略上有所不同,这给稳定的半过渡态飞行续航和起降展示带来了一些不确定性。 因为eVTOL具备天然的垂直特性,所以没有万能定律,只能是具体问题具体分析。