引言
电动垂直起降(eVTOL)飞行器作为未来城市交通的革命性载体,正逐步重塑城市出行与应急响应的范式。其应用场景广泛,涵盖灾难救援、医疗紧急运输、包裹配送等关键领域,同时具备类似传统出租车的载人功能,为城市立体交通网络的构建提供了全新可能。这类新型飞行器通过采用创新材料、独特设计特征及先进推进技术,适配城市复杂环境与多样化任务需求,而混合式或全电动动力系统是其核心技术亮点之一,与之配套的储能系统(ESS)则成为保障飞行器稳定运行的关键组件。
eVTOL的储能系统通常由大量电池模块构成,包含电池单体、车载电池管理系统、布线、传感器及其他关联硬件,是飞行器动力输出的核心支撑。然而,由于混合式和全电动动力系统的新颖性与独特性,美国现行适航认证要求中存在明显缺口,尤其缺乏针对作为飞行器主要推进动力的ESS耐撞性认证标准。目前最具参考性的法规是《联邦法规法典》第14篇第27部分第952节(14 CFR § 27.952)“燃油系统抗坠毁性”,该标准要求最关键的燃油箱需通过50英尺高度的跌落测试。鉴于ESS认证标准的缺失,行业正尝试将这一燃油系统标准应用于eVTOL的储能系统认证。
在联邦公报中,有两例关于eVTOL依据14 CFR §21.17(b)进行认证的案例,该条款适用于“尚未制定适航标准的特殊类别航空器”。此类认证方式拟整合现有法规(包括14 CFR §23、25、27、29等部分)的相关要求,并补充飞行器专属条款。案例中明确提出将新增ESS相关要求,“纳入储能系统耐撞性条款以契合§27.952的核心意图,并删除液体燃油系统专属要求”,新增条款规定“每个储能系统的设计需确保在所有可能的运行条件下保持能量存储能力,并在紧急着陆或其他可存活的撞击(坠毁着陆)后最大限度降低对乘员的危害”。但目前尚未明确具体的合规方式及通过认证的性能指标要求。值得注意的是,欧洲航空安全局(EASA)已在其《特殊条件VTOL》文件(MOC VTOL.2325(a)(4))中认可50英尺跌落测试作为合规方式之一。
作为“革命性垂直升力技术(RVLT)”项目的重要组成部分,NASA开展了一项专项研究计划,通过垂直跌落测试评估不同配置下ESS模块的性能。该研究的核心目标并非依据现有或拟议认证要求对ESS模块进行认证,而是通过测试明确冲击载荷下ESS模块的基本影响因素、失效模式及作用机制,为后续抗冲击结构设计、测试条件制定提供理论支撑,并向行业共享测试数据。研究分为三个阶段,本报告聚焦第一阶段测试,该阶段在无外部衰减装置及附加结构的条件下,对eVTOL的ESS模块进行不同方向的50英尺跌落测试。第一阶段报告分为两部分,本文(第一部分)重点阐述测试设置及各测试的载荷环境数据,第二部分将详细介绍模块的变形情况、拆解检查结果及摄影测量数据。

测试结果
本阶段测试采用电力系统公司(EPS)的电动推进离子核心(EPIC)储能模块,每个模块重量约24.5磅(约11.11kg),额定容量2.3千瓦时,均符合TSO-179b和UN38.3标准要求。测试采用零电荷状态配置,以最大限度降低(但不完全消除)测试过程中热失控(TR)的风险,便于后续拆解检查及损伤定位。测试共进行四次,分别采用四种不同的模块方向(以排气口为参考基准):正面朝上(Rightside Up)、正面朝下(Upside Down)、侧向(Sideways)和平向(Flatwise),其余两个方向与测试方向对称,故未重复测试。测试前及测试后均通过诊断测量监测模块状态,收集单体电压、温度及模块内部各单体间的连通性数据。
测试严格遵循14 CFR §27.952的指导要求,并采用参考文件9中建议的测试流程,模块撞击刚性表面且无周围结构或衰减装置。测试在国家航空研究院(NIAR)的室外跌落测试设施进行,由NIAR测试人员操作。测试装置为NIAR研发的 trolley 及导向线系统,模块通过电缆悬挂于 trolley 下方,提升至距离刚性撞击表面50英尺(约15.24m)高度后释放,trolley 与模块沿导向线坠落,模块先于 trolley 的制动系统接触撞击表面,实现近乎自由落体撞击刚性表面的测试条件。
测试主要收集加速度、温度及变形数据,每个模块配备三个加速度计和四个热电偶:两个量程为20,000g的加速度计安装在外壳组件朝上表面的两个对角处(编号SN 1631和SN 1632),一个量程为2000g的加速度计(Accel 2000)安装在朝上表面的中部,用于测量模块刚性区域(角落)和非支撑/柔性区域(中部)的响应,并捕捉异常冲击事件;两个热电偶安装在非喷漆侧面,两个安装在朝上表面(具体位置未严格控制)。所有加速度计和热电偶数据通过外置数据采集系统以100kHz的频率记录。此外,每个模块的两个表面喷涂随机散斑图案,用于高速摄影测量及数字图像相关技术的变形追踪,同时通过黄黑相间的“领结”目标确认冲击速度和角度,高速相机分辨率通常为100万像素,采集速率在5-10kHz之间,辅以红外相机和实时相机观察测试过程。
每次冲击后,模块保持测试后状态静置1小时,持续监测热电偶温度,若出现不受控的温度升高(可能是热失控的迹象),则将模块转移至大型浸泡槽;若温度稳定,则进行测试后检查,包括模块整体状态、电解液气味、火花/烟雾/火焰痕迹观察,记录内部温度及单体电压(若可获取)。随后模块转移至室外封闭存储区,24小时后再次检查温度及状态变化,确认无异常后进行后续拆解分析。
2.1
平向(Flatwise)方向测试
平向测试中,模块排气口垂直于撞击表面且朝向南方,正极朝向西方。加速度计SN 1631安装在外壳东北角,SN 1632安装在西南角,Accel 2000安装在朝上表面中部靠近标识牌位置;模块负极端及底部喷涂随机散斑图案,通过朝上表面的电缆与 trolley 连接。
测试于2023年11月14日中午12:32进行,环境温度68.3°F(约20.2℃),相对湿度35.6%,风速6英里/小时(约9.66km/h),阵风可达10英里/小时(约16.09km/h)。模块撞击西北角,北侧低角度17.9°,西侧低角度1.4°,冲击速度46.9英尺/秒(约14.30m/s)。
测试序列如图1所示(从东侧观察负极所在侧面),模块首先北侧底部撞击表面,随后以逆时针方向旋转,顶部在4.8毫秒后撞击,反弹过程中持续逆时针旋转,受连接电缆约束,反弹持续约1秒后静止,最终略微向西旋转,保持原始撞击侧面着地(图2)。

图1 平放姿态测试时序图

图2 平放姿态测试后样品摆放状态
加速度数据如图3所示,采用前后4极点1000Hz低通巴特沃斯滤波器处理(因测试中测量到的脉冲持续时间极短且特性特殊,1000Hz为最低合适截止频率,仅导致初始峰值信号差异2.7%,全脉冲信号差异1.4%,低于该频率会显著低估初始峰值并增加信号损失)。图中显示两个明显的峰值,与两次撞击事件对应:北侧SN 1631加速度计在撞击时记录峰值2820g,南侧SN 1632加速度计在撞击后4.8毫秒记录峰值2802g,这是由于非零冲击角度导致两侧撞击时间略有差异,且角落为外壳最刚性区域,故峰值极高;中部Accel 2000在撞击后1毫秒记录峰值约1285g,为角落峰值的一半左右,且时间处于两侧撞击之间,同时记录到两侧撞击的小幅峰值,表明中部位置更适合测量模块整体响应。

图3 平放姿态下的加速度数据曲线图
测试后诊断确认模块电压和温度读数正常,连通性良好,表明内部损伤(若存在)轻微,未影响内部连接;热电偶数据未显示明显温度升高,确认无热失控发生。模块按流程在室外存储24小时后,进入后续拆解分析阶段。
2.2
正面朝上(Rightside Up)方向测试
正面朝上测试中,模块排气口朝上,与撞击表面相对,正极朝向西方。加速度计SN 1631安装在东北角,SN 1632安装在西南角,Accel 2000安装在顶部表面靠近排气口位置;正极所在侧面及标识牌侧面喷涂随机散斑图案。
测试于2023年11月14日下午3:26进行,环境温度68.2°F(约20.1℃),相对湿度34.8%,风速5.7英里/小时(约9.17km/h),阵风可达12.3英里/小时(约19.79km/h)。模块撞击东南角,南侧低角度2.2°,东侧低角度2.6°,冲击速度52.8英尺/秒(约16.09m/s)。
测试序列如图4所示,模块以轻微左侧(东侧)低角度撞击,由于角度较小但非零,右侧(西侧)在0.7毫秒后撞击。两侧均接触表面后,模块发生向下变形(与平向测试类似),朝上表面在撞击后约1.8毫秒出现明显向下的凹形变形;随后模块反弹,约4.9毫秒后离地,最终侧躺静止(图5)。

图4 正向姿态测试时序图

图5 正向姿态测试后样品摆放状态
加速度数据如图6所示,三个加速度计的加速度曲线形状和时间分布相似,确认脉冲持续时间约3-3.5毫秒,表明冲击状态正常。峰值加速度出现时间:SN 1631为撞击后1.8毫秒,SN 1632为2.1毫秒,其中SN 1631在1.8毫秒前记录到约788g的局部峰值,表明该侧先接触撞击表面。角落加速度计测量峰值分别为1210g(SN 1631)和1199g(SN 1632),中部Accel 2000测量峰值为1498g,略高于角落但数值接近。初始撞击后无明显后续事件,模块载荷全部发生在3-3.5毫秒内。

图6 正向姿态下的加速度数据曲线图
测试后诊断确认模块电压和温度读数正常,连通性良好,表明内部损伤(若存在)未影响诊断相关的连接功能;热电偶数据未显示明显温度升高,无热失控发生。模块经24小时室外存储监测后,进入拆解分析阶段。
2.3
正面朝下(Upside Down)方向测试
正面朝下测试中,模块排气口朝下朝向撞击表面,正极朝向东方。正极所在侧面及冷却板侧面喷涂随机散斑图案;加速度计SN 1631安装在西北角,SN 1632安装在西南角(因连接电缆约束,此为唯一一次加速度计未安装在相对侧面的测试),Accel 2000安装在外壳底部表面中部靠近西边缘位置(该表面在本测试方向中朝上)。
测试于2023年11月13日下午4:41进行,环境温度69.6°F(约20.9℃),相对湿度40.7%,风速4.3英里/小时(约6.92km/h)。模块撞击西北角,北侧低角度6.2°,西侧低角度2.3°,冲击速度48.5英尺/秒(约14.78m/s)。
测试序列如图7所示,模块北侧首先接触撞击表面并开始挤压变形,南侧在约1.4毫秒后接触表面;与平向测试不同,由于冲击角度接近正常,模块未发生旋转,保持撞击前方向。南侧接触后,模块在初始撞击约11毫秒后开始反弹,受连接电缆约束略微旋转,0.31秒后西北角再次接触撞击表面,最终以原始正面朝下方向静止(图8)。

图7 倒置姿态测试时序图

图8 倒置姿态测试后样品摆放状态
加速度数据如图9所示,显示两个明显事件:西北角SN 1631在撞击时出现峰值,确认北侧先撞击;西南角SN 1632在撞击后约2毫秒出现峰值,与南侧接触时间一致。中部Accel 2000也记录到这两个峰值,但因远离撞击表面,数值显著较小。此外,加速度数据显示撞击后约10毫秒内存在非零加速度,高速相机数据确认模块挤压变形持续约11毫秒,与加速度测量结果一致。

图9 倒置姿态下的加速度数据曲线图
为获取模块挤压过程中的整体响应,对Accel 2000数据进行进一步分析(图10):采用1000Hz截止频率过滤后显示潜在脉冲形状,改用500Hz截止频率过滤后呈现三角形脉冲,峰值500.2g,持续时间约6毫秒(略短于视频观察到的11毫秒,因事件持续时间短且相机帧率有限,精确计时存在难度)。

图10 2000g 加速度计在两种截止频率下的垂直加速度曲线图
测试后诊断未能获取电压和温度数据,表明内部损伤导致连通性丧失;但万用表手动测量显示正极与模块底盘短路,确认存在内部损伤和/或变形,同时正负极端子电压为32.9V,表明至少单体间仍保持连通。热电偶数据未显示明显温度升高,无热失控发生。模块经24小时室外存储监测后,进入拆解分析阶段,平向、正面朝上及正面朝下测试后的模块存储状态如图11所示。

图11 室外储存中的测试样品
2.4
侧向(Sideways)方向测试
侧向测试中,模块正极所在侧面朝向撞击表面,排气管朝向北方。加速度计SN 1631安装在东北角,SN 1632安装在西南角,Accel 2000安装在朝上表面中部;底部及冷却板相对的平面喷涂随机散斑图案,通过朝上表面的电缆与 trolley 连接。
测试于2024年3月13日上午9:07进行(因模块供应原因,与其他测试不同时进行,但测试设置、仪器配置及流程完全一致),环境温度53.9°F(约12.2℃),无风,相对湿度61.5%。模块沿西边缘正常撞击,西侧低角度6.5°,冲击速度50.6英尺/秒(约15.42m/s)。
测试序列如图12所示(相机朝向模块底部,模块中部深色竖线为外壳接缝),模块以轻微西侧低角度撞击混凝土表面,由于正极从东北角突出(朝向撞击表面),西侧与正极几乎同时撞击。初始撞击后1.7毫秒内,朝上表面向内偏转直至最大变形,随后开始反弹,朝上表面恢复至近似水平状态,仅残留轻微向外弯曲变形。反弹过程中,负极出现火花,表明此时或此前发生内部短路,火花始于撞击后约6.3毫秒,持续至8.2毫秒。模块在初始撞击约0.639秒后再次接触撞击表面,最终以原始测试方向静止(图13)。
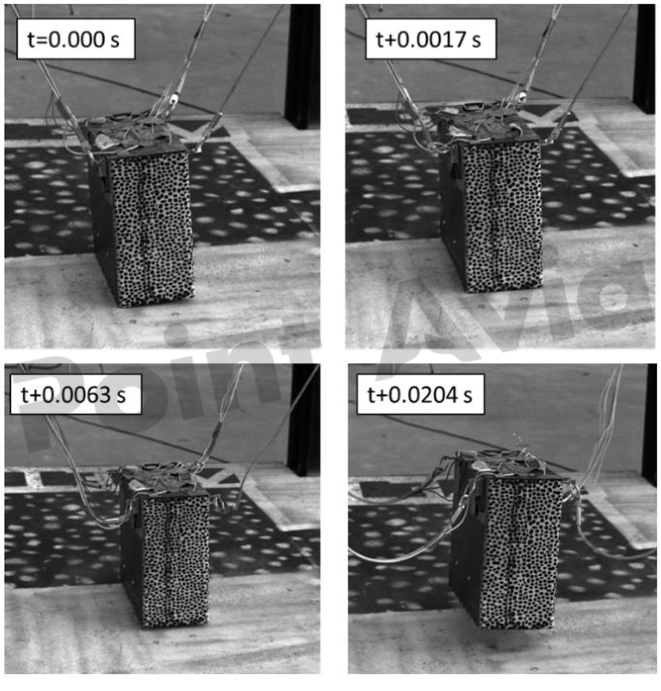
图12 侧向姿态测试时序图

图13 侧向姿态测试后样品摆放状态
加速度数据如图14所示,角落加速度计出现两个大幅峰值:西南角SN 1632(初始撞击侧)峰值约3013g,持续时间约1毫秒;东北角SN 1631峰值约2744g,持续时间1.3-1.5毫秒,两个峰值间隔约0.42毫秒,与图12所示冲击序列一致(因事件持续时间短且相机帧率有限,精确计时存在难度)。中部Accel 2000记录峰值约1465g,出现于初始撞击后0.37毫秒;角落加速度计未记录到其他显著事件,而中部加速度计在撞击后出现衰减振荡响应,这是由于其安装位置的外壳表面动态特性导致。

图14 侧向姿态下的加速度数据曲线图
测试后未能通过通信端口的诊断监测记录连通性数据,表明内部组件存在损伤或变形;未测量端子间电压。热电偶数据未显示明显温度升高,无热失控发生。模块经24小时室外存储监测后,进入拆解分析阶段。
2.5
所有测试的加速度数据对比
为便于对比分析,将所有测试中首先撞击侧角落的加速度数据汇总(图15),结果显示不同方向测试的加速度峰值和持续时间存在显著差异,这主要源于两个因素:一是模块不同方向的局部刚度特性(例如软包电池的排列方向需要更多支撑结构),二是测试条件(冲击方向和速度)的细微差异。具体而言,平向和侧向测试中,加速度计安装在模块的侧面(含标识牌或其相对侧面),而正面朝上和正面朝下测试中,加速度计安装在模块的端面(含排气口或其相对端面),因此前两者测量到更高的加速度峰值,后两者峰值较低,分析时需考虑安装位置的影响。
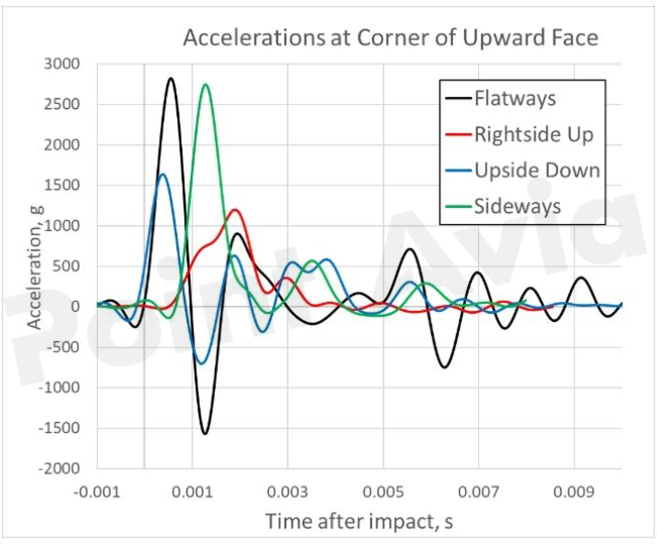
图15 所有测试样品角部位置加速度数据对比曲线图
所有测试的中部位置加速度数据汇总如图16所示,与角落位置相比,不同方向测试的中部加速度数据更为接近。差异原因主要包括:一是部分测试存在较大的非正常冲击角度,角落加速度计因点载荷作用测量到更高数值;二是角落为模块最刚性区域(端面与侧面连接处),而中部加速度计在四次测试中的三次均安装在朝上表面中部,靠近外壳与内部电池容纳组件的连接紧固件位置,由于无法直接测量电池容纳组件的响应,中部加速度数据被视为反映模块内部电池状态的最佳可用指标(正面朝上测试中,因排气口存在,中部加速度计安装在朝上表面侧面,故结果与角落数据更为接近)。

图16 所有测试样品中部位置加速度数据对比曲线图
数值上,正面朝下方向的中部峰值加速度最低(743g),其余三个方向的中部峰值加速度分别为:平向1286g、正面朝上1498g、侧向1467g,整体较为一致。脉冲形状方面,正面朝下方向呈现梯形至矩形特征,其余三个方向为三角形特征;正面朝下方向的脉冲持续时间更长、峰值更低,这可能反映了外壳挤压过程中的持续加速度,而其他三个方向的外壳挤压程度较小,因此持续运动更短。有关变形的详细分析将在第二部分报告中展开。总体而言,所有测试的载荷环境均为冲击型,其加速度峰值和持续时间与典型碰撞测试的响应存在显著差异。

总结
本阶段测试针对四个储能模块,在零电荷状态、无外部衰减装置及附加结构的条件下,进行了四种不同方向的50英尺垂直跌落测试,核心目的是探究模块在冲击载荷下的失效模式、方向对测试结果的影响及整体性能表现。
测试产生的加速度呈现极高峰值、短持续时间的冲击型脉冲特征,与典型碰撞测试数据存在显著差异。模块中部位置的峰值加速度范围为743g至接近1500g,角落位置的峰值加速度最高可达3013g(侧向测试)。所有测试模块均未发生热失控,测试后诊断结果显示:正面朝上和平向测试的模块诊断系统保持完整且功能正常,表明内部损伤(若存在)未影响相关系统功能;正面朝下和侧向测试的模块无法完成诊断测量,提示存在较严重的内部损伤或变形。
测试完成后,所有模块均已拆解,对内部组件进行了详细检查,记录了电池单体穿刺或破裂、电解液泄漏、内部组件短路等损伤情况(这些损伤均可能增加热失控风险)。基于检查结果,采用统一评分标准对损伤程度进行量化评估,相关结果将在第二部分报告中呈现。
定子是实现“磁电解耦”的核心,方案采用“六相定子+多组三相解耦组件”的设计,以图3(单定子-单转子架构)为例,详细说明:
本阶段测试成功获取了eVTOL储能系统在50英尺跌落冲击下的载荷环境数据,为储能系统耐撞性认证相关讨论提供了关键支撑。测试结果表明,模块的响应显著依赖于冲击方向,特定测试条件下出现了多种失效模式,为分析载荷环境与损伤类型、程度的相关性提供了基础数据。需要注意的是,本测试仅针对特定型号的ESS模块(采用软包电池架构),其他电池架构及设计因素可能导致不同的测试结果,但由于各类储能系统存在诸多共性特征,测试结果仍可为多种系统及安装场景提供参考(需结合具体背景)。
作为RVLT项目的第一阶段研究,本测试通过无附加结构、无连接、无电池管理系统(BMS)等支撑系统的配置,实现了模块自身响应的隔离测量。第二阶段测试已于2024年完成,针对本阶段两种测试方向,在模块配备衰减装置的条件下进行测试,以一定程度上模拟实际安装配置,同时保持飞行器无关性。第三阶段计划基于前两阶段的研究成果,对带电模块进行测试,目前仍处于规划阶段。本阶段测试数据为后续研究及行业标准制定奠定了重要基础,为eVTOL储能系统的安全设计与适航认证提供了科学依据。




![2026年全球及中国芯片测试接口行业市场现状、竞争格局及未来前景展望:全球市场规模增长至近30亿美元,本土企业加速追赶[图]](https://xtechcon-static.oss-cn-chengdu.aliyuncs.com/xtimes/xtimes/images/2026-02-28/69a23e89418be.jpeg)





