
下载地址: https://resource.hpmicro.com/hpm_apps_v1.11.0.zip
文档路径:
本地路径:
English: hpm_apps/docs/index.html 中文: hpm_apps/docs/index_zh.html
在线文档:English: https://hpm-apps.readthedocs.io/en/latest/ 中文: https://hpm-apps.readthedocs.io/zh-cn/latest/
代码仓库
hpm_apps:
github: https://github.com/hpmicro/hpm_apps gitee: https://gitee.com/hpmicro/hpm_apps
hpm_sdk:
github: https://github.com/hpmicro/hpm_sdk gitee: https://gitee.com/hpmicro/hpm_sdk
请注意:每个 HPM_APPS 应用示例均依赖特定版本的 HPM_SDK,使用前请查阅对应示例目录中的 README 文件,确认 SDK 版本要求。若需适配其它版本 SDK,可自行修改版本限制完成适配。
1. 三网合一:HPM6750 Combo 开发板多网络融合方案
概述
HPM6750 Combo 开发板是基于 HPM6754 RISC-V MCU 设计的高性能开发平台,板载 4MB Flash,集成了 USB、SDIO WIFI、RGMII 三大网络接口,支持从外置 XPI Octal Flash 启动,为用户提供一站式高性能外设功能与性能评估体验。

核心特性
三网合一 —— 同时支持 RGMII 有线以太网(~900Mbps)、SDIO WIFI(~100Mbps)、USB 4G 蜂窝网络,三路独立运行,互不干扰
XPI Octal Flash 启动 —— 板载 XPI0/XPI1 8线接口,支持从外置 Octal Flash 启动代码,8线模式最高频率 133MHz,DDR 传输,相比传统 4线 Flash 带宽翻倍
双 USB 接口 —— 内置高速 PHY,USB0/USB1 均支持 Device 和 Host 模式,基于 CherryUSB 协议栈,可根据应用场景灵活配置
WIFI 高速无线 —— AP6256 模块,SDIO 接口,2.4G/5G 双频,实测 TCP 速率可达 90Mbps 以上
RGMII 千兆有线 —— 基于 RTL8211F PHY,实测 TCP 速率可达 900Mbps
多网融合架构


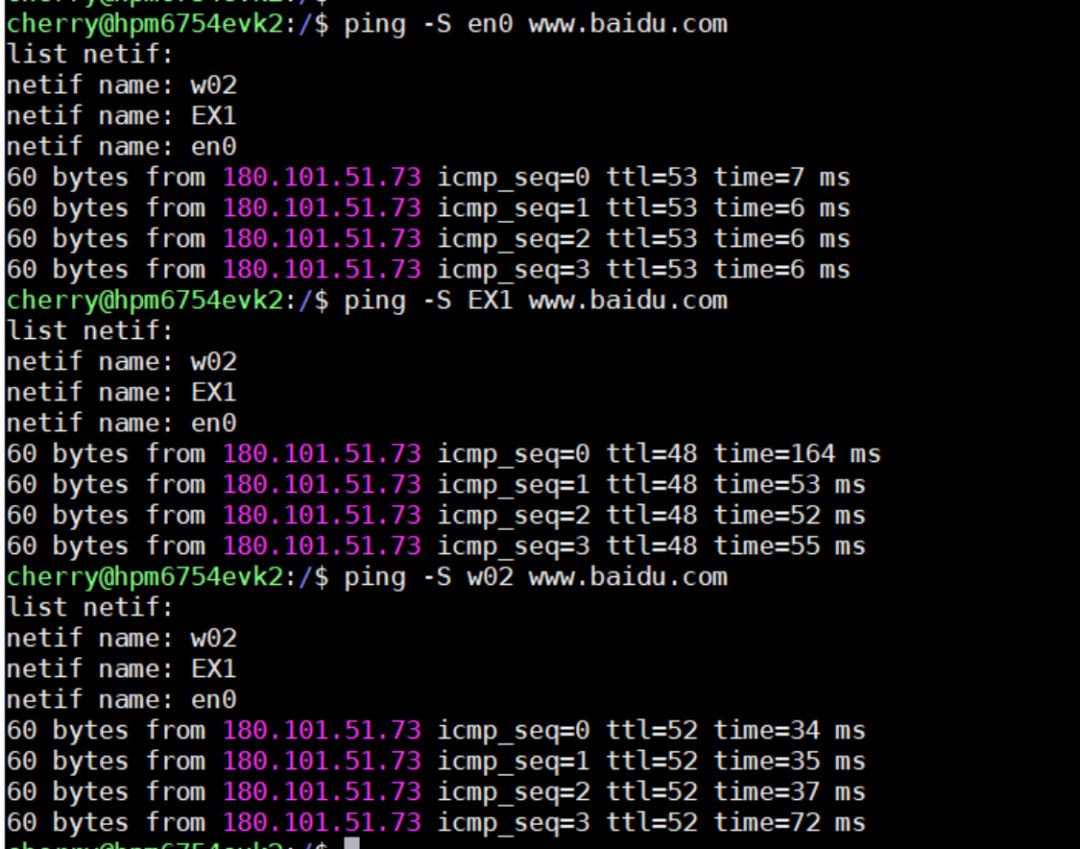
三路网口均通过 lwIP 协议栈统一管理,各自独立 MAC/IP,支持 ping、iperf 等网络性能测试。用户可通过 -S 选项指定网卡进行定向通信。
性能实测
WIFI iperf TCP 吞吐测试:

RGMII iperf TCP 吞吐测试:

典型应用场景
工业边缘网关(有线+无线+蜂窝多网冗余) 需要灵活网络接入的嵌入式设备 多网融合通信终端
2. 八层硬件合成:基于 HPM6800 的多图层仪表盘方案
概述
本方案基于 HPM6800EVK 平台的 LCDC(LCD 控制器)8 层硬件合成能力,结合 LVGL、FreeRTOS 与 PDMA,实现了一套面向车载数字仪表的 八图层 Dashboard 演示工程。与传统"整屏重绘"方案不同,本方案将仪表盘拆分为 1 个全屏基础层 + 7 个局部硬件叠加层,高频动画元素独立成层,大幅降低无效刷新面积与内存带宽压力。

核心原理:硬件图层合成
LCDC 支持最多 8 个硬件图层,各层独立帧缓冲、独立刷新,最终由硬件按图层顺序进行 Alpha 混合输出。这意味着:
- 局部变化不触发全局重绘
—— 指针旋转只刷新指针所在小图层 - 各层独立帧率
—— 背景层几乎不刷新,指针层可按 60fps 独立更新 - 透明叠加
—— 各子层采用 ARGB8888 格式 + src_over 混合模式

效果动图:

注:以下动图仅作效果演示,帧率受 GIF 录制影响,不代表实际运行性能。
八图层划分

渲染链路
LVGL 绘制 → PDMA 脏区搬运 → D-Cache 同步 → LCDC 硬件合成 → 显示输出
- 主层 Direct Render
:LVGL 直接在全屏 buffer 上组织画面,PDMA 仅搬运脏区域到 LCDC 扫描缓冲,减少 CPU 逐像素拷贝 - 子层 Full Render
:子层面积小,整层重绘成本可控,flush 时直接切换双缓冲 - 三缓冲设计
:主层采用 3 组全屏缓冲(2 组绘制 + 1 组扫描),兼顾性能与显示稳定性

方案价值
- 降低无效像素搬运
:高频动画仅占用对应子层极小带宽 - 提升动画流畅度
:各层独立刷新,无互相干扰 - 便于扩展维护
:显示问题可按层定位,新增动态控件只需增加子层 - 适用场景
:车载仪表盘、智能座舱 HMI、工业 HMI 等大分辨率显示场景
3. 显控一体:EtherCAT 主站电机控制方案
概述
本方案基于 HPM6800EVK 平台,融合开源 CherryECAT 主站协议栈与 LVGL 图形界面,实现了一套 EtherCAT 主站 + 触摸屏显控一体 的电机控制解决方案。方案支持 CIA402 标准协议(CSP/CSV 模式),配合实时波形显示与触摸交互,为工业运动控制提供"一站式"开发参考。

核心特性
EtherCAT 主站
基于 CherryECAT 开源协议栈,异步队列式传输,单次可携带多个 Datagram 零拷贝技术:直接使用 ENET 收发缓冲区,减少内存复制 支持热插拔与从站自动扫描 分布式时钟(DC)同步
CIA402 电机控制
支持 CSP(位置控制模式)、CSV(速度控制模式) 多台从站设备切换控制 位置/速度/状态实时反馈
LVGL 触控界面
弧形滑块调节目标速度/位置 Chart 图表实时显示运动曲线(期望值 vs 实际值双色对比) 启动/停止、正转/反转快捷操作按钮 设备列表与状态实时显示
系统架构


系统启动后可自动扫描 EtherCAT 总线上的伺服驱动器,在触摸屏上呈现完整的设备信息与控制界面。波形图实时绘制电机运动轨迹,期望值与实际值以不同颜色叠加显示,方便调试与性能分析。

典型应用场景
工业机器人运动控制器快速原型 多轴伺服系统显控一体终端 CNC/包装/印刷等领域的 EtherCAT 主站评估
4. 多轴随动:HPM6E00 机器人伺服驱动方案(ROBOT3.0)
在工业多轴运动控制中,如何用一颗 MCU 同时搞定 EtherCAT 从站通信、高精度电机控制与实时调试?HPM6E_ROBOT_SERVO3.0 给出了答案。
概述
本方案基于先楫 HPM6E00 系列 RISC-V MCU,采用自研闭环步进电机算法库,提供了一套完整的闭环步进伺服驱动参考实现。
HPM6E00 芯片为运动控制场景深度定制:内置 3 端口 EtherCAT 从站控制器(ESC),支持多设备级联;16 通道高分辨率 PWM、4 通道 Sigma-Delta 信号接收单元、16 路 16 位 ADC,以及 PLB 可编程逻辑模块,将原本需要多颗芯片协同的功能集成于一身。
方案关键指标:输入电压 24V,最大输出电流 13A,最高转速 900rpm。开放电机调整参数与核心函数接口,方便用户针对不同规格电机快速适配。

硬件平台
方案以达妙 DM-J6006-2EC 作为示例电机,主要接口如下:


电机接线关系与电气参数:


核心功能
EtherCAT 从站与 CIA402 协议
基于内置 ESC 实现 EtherCAT 从站通信,支持 CSP(位置控制)、CSV(速度控制)两种模式 支持 FoE(File over EtherCAT)固件升级,现场即可更新固件,无需额外烧录工具
闭环步进控制算法
先楫自研闭环算法,以步进电机的成本实现接近伺服的动态性能 电流环参数自动整定:在线辨识 PI 参数,无需手动调参 惯量辨识:自动辨识负载惯量,优化加速与制动响应 3P3Z 前馈控制:提升速度环带宽,增强抗扰动能力
完善的系统保护
硬件过流保护、过压/欠压保护、飞车保护,确保设备长期稳定运行
HPM Monitor Studio 实时调试
通过 UART 连接上位机,以波形方式实时监测和调整控制变量,显著提升调试效率
典型应用场景
工业机器人多轴关节伺服驱动 多轴协同运动控制(级联 EtherCAT 从站) 需要现场固件升级与远程调试的分布式驱动节点
5. 协议互通:EtherCAT-CAN 网关全链路通信方案
概述
本方案由三个协同模块组成,实现了从 EtherCAT 主站 → ECAT-CAN 网关 → CAN 终端设备 的完整协议转换与数据互通链路,为先楫 MCU 在工业现场总线融合场景提供端到端的参考实现。

系统组成
主站模块(Gateway ECAT Master) —— HPM6E00 Full Port 硬件平台
基于 CherryECAT 主站协议栈 3.5 寸 LCD 屏幕显示通信状态 支持 Trigger(按键触发)和 Cycle(周期循环)两种发送模式 可配置 CAN 参数:波特率(10k~1M)、帧模式(标准/扩展)、数据帧/远程帧 实时显示发送/接收帧数、数据内容

网关模块(Gateway ECAT2CAN) —— HPM6E00EVK 平台
基于 ETG 5001.5000 标准网关协议,实现 EtherCAT 报文与 CAN 报文双向转换 支持 Module Slot 方式动态修改 PDO 映射 通过 CoE(CANopen over EtherCAT)对象字典配置 CAN 波特率、发送模式 支持标准帧/扩展帧/远程帧/数据帧全类型转换

CAN 终端设备(Gateway Device) —— HPM5E00EVK 平台
接收 ECAT 主站经网关转换后的 CAN 报文 数码管实时显示接收报文数量 通过按键将当前计数值以 CAN 报文回传至主站 支持 USB Shell 命令行调试
通信流程

主站上电后扫描并配置从站(网关),进入 OP 状态 主站通过 Trigger 或 Cycle 模式发送数据,经网关转换为 CAN 帧发送至终端设备 终端设备数码管实时累加显示接收帧数 按下终端设备按键,当前计数值以 CAN 帧回传网关,网关转换为 ECAT 报文上报主站 主站 LCD 同步显示回传数据,两端数据一致

核心指标



典型应用场景
工业现场 EtherCAT 网络与传统 CAN 设备互联 老旧 CAN 设备接入 EtherCAT 总线系统 分布式 CAN 节点数据汇集与上报
6. 巧用硬交换:基于 TSN 交换引擎的多端口以太网通信方案
概述
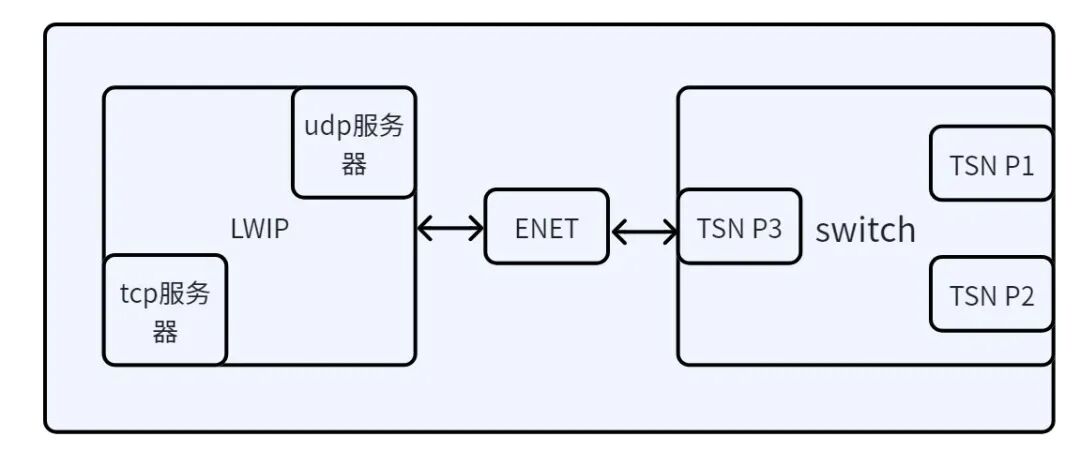
本方案基于 HPM6E 系列 MCU 内部集成的 TSN 硬件交换引擎(TSW),巧妙地使用 ENET 外设代替 TSW 的内部 CPU PORT,构建了一个支持千兆线速交换的多端口以太网通信系统。
方案的核心设计在于:TSW 共有 P1、P2、P3 三个外部端口,其中 P1/P2 经 PHY 引出作为对外网口,P3 端口则通过板上电阻直连到 MCU 的 ENET MAC,将 ENET 作为内部的"CPU 端口"使用。这样既保留了 TSW 的硬件二层交换能力,又规避了内部 CPU PORT 的性能瓶颈,实现了真正的千兆级 CPU 接入。

核心原理:为什么用外部 P3 代替内部 CPU PORT?
TSN 交换模块通常提供一个内部 CPU PORT 用于与 MCU 交互数据,但该内部端口存在速率受限的问题。本方案另辟蹊径:
- TSW P3 → 电阻直连 → ENET MAC
:借助外部 TSW 端口(P3)通过物理连线接入 ENET,以 ENET 作为 CPU 侧的网络接口 TSW P1/P2 之间实现纯硬件二层线速转发,CPU 完全不参与数据面交换 需要 CPU 处理的帧(匹配本机 MAC 或广播帧)由 TSW 转发至 P3,经 ENET 进入 lwIP 协议栈

硬件编号说明(见上板图):

双模式组网
单网卡模式 —— 设备对外呈现单一网络身份
一套独立 MAC/IP,两个对外端口均可通信 P1/P2 之间硬件交换,适用于设备串联组网,无需外部交换机
双网卡模式 —— 设备对外呈现两个独立网络身份

两套独立 MAC/IP,各自绑定一个对外端口 适用于网络隔离场景(如内外网分离),各端口独立子网与网关
核心特性
- 千兆线速交换
:P1/P2 之间硬件二层转发,不占 CPU 带宽;TSW 与 ENET 均工作于 RGMII 模式,P3-ENET 链路同样为千兆 - 10/100/1000M 自适应
:自动协商速率,千兆时关闭存储转发以降低延迟,百兆以下开启存储转发 - FreeRTOS + lwIP
:支持多任务并发,TCP/UDP Echo 测试验证 - SSD1306 OLED 显示
:板载 OLED,集成 U8G2 图形库,默认显示 HPM Logo - USB Shell 命令行
:支持交互式调试与配置
典型应用场景
工业以太网环网/线形拓扑中的交换节点 需要网络隔离的嵌入式网关(双网卡模式) 以极低成本替代独立交换机芯片的通信终端
完结
在使用过程中有任何疑问或者建议,欢迎在 github 对应项目中提交。
问题提交
hpm_apps Issues:
https://github.com/hpmicro/hpm_apps/issues
https://gitee.com/hpmicro/hpm_apps/issues




先楫半导体
“先楫半导体”(HPMicro)是一家致力于高性能嵌入式解决方案的半导体公司,产品覆盖微控制器及其配套的开发工具和生态系统。公司总部坐落于上海市浦东软件园区,并在天津、苏州和深圳均设立分公司,入选2025年福布斯亚洲Top100最具潜力的企业榜单。先楫半导体以产品质量为本,所有产品均通过严格的可靠性测试。目前已经量产八大系列高性能通用MCU产品,产品性能及通用性领先国际同类产品并通过AEC-Q100认证。公司已完成ISO9001质量管理和ISO 26262/IEC61508功能安全管理体系双认证,全力服务中国乃至全球的工业自动化、机器人、能源和汽车市场。更多信息,请访问 https://hpmicro.com/




