来源:棱角机器人
「3D视觉从入门到精通」知识星球(点开有惊喜) !星球内新增20多门3D视觉系统课程、入门环境配置教程、多场顶会直播、顶会论文最新解读、3D视觉算法源码、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

随着泳池清洁机器人的发展,无线化和智能化是必然趋势。而智能化的核心,在于解决水下的建图、定位、感知和导航等问题。
前阵子,在庭院机器人社群里,就聊到了关于泳池机器人定位导航的话题。
资深业内人士大多清楚,对于绝大多数的户外移动机器人,定位导航和避障是其很核心的技术方案。各厂商在定位、导航和避障方案上的选型,会在很大程度上影响其产品的稳定性、成本、量产以及用户口碑。
而泳池机器人面临的是水下环境,是三维环境,比起地面上的二维环境而言,定位导航的复杂度更高。同时,水下环境也很可能会对相关传感器产生多重干扰。比如,光线折射可能导致视觉方案失效,浑浊水质容易阻挡激光雷达的光束,水流扰动容易影响惯性导航的效果,等等。
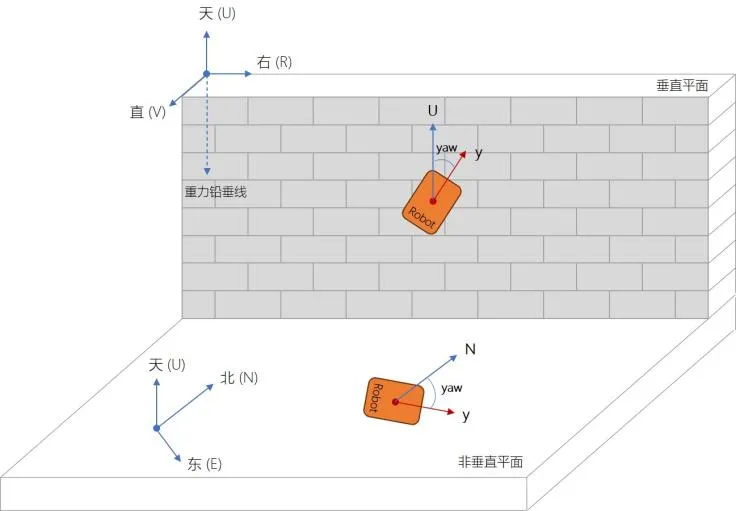
泳池地理坐标系
因此,现实的情况是,原来在地面上的移动机器人所使用的传感器及定位导航方案,很难直接应用于水下机器人。不少厂商就只能采用相对特别的方案,或者就做深度自研。
目前,主流泳池清洁机器人厂商的定位导航方案,主要依赖于SLAM、惯性导航、视觉导航、声学定位等技术的组合使用,结合路径规划和智能避障算法等。在传感器方面,则主要涉及到超声波、红外、IMU、相机、激光雷达、声呐等。
相比于光学传感器在水下环境中遇到的困难,声学类传感器对于水下应用反倒受影响较小。
从之前社群里聊到的情况来看,传统的定位导航独立方案,在水下环境中会存在一定的局限性。

比如,对于常规的视觉导航方案,水下光线折射可能扭曲图像,悬浮颗粒可能导致误识别,存在夜间失效问题。另外,可能遇到的故障,包括误判池底落叶为障碍物、忽略透明玻璃墙,等等。
对于通常的激光雷达方案,水体对激光散射率可能高达90%以上,有效探测距离常常不足0.5米,能耗较高且易受气泡干扰。
而单独使用惯性导航(IMU)的方案,陀螺仪积分误差会随时间累积,单独使用30分钟后,可能会产生不小的定位偏移。

IMU传感器
因此,有的厂商会采用超声波+陀螺仪补偿的方案。比如,以超声波为主、多传感器融合;同时,针对复杂地形,也会通过算法获得弥补。
接下来,列举部分泳池机器人厂商的定位导航方案(源自公开信息),以做对比分析:
元鼎智能:Aiper泳池机器人的部分型号,采用超声波雷达感知周围环境,并通过该技术在水下创建高精度地图,结合SLAM算法进行自主导航。
望圆科技:部分型号搭载激光雷达、超声波雷达、惯导(IMU)、高清摄像头等。据悉,障碍物识别精度达±3cm。基于深度学习算法,自动识别泳池形状(矩形 / 异形)、坡度及地漏位置等。
星迈创新:部署了定制的超声波传感器,辅以IMU、碰撞传感器等,实时采集水下距离、姿态、边界等信息。在水下建图和定位方面,前端处理利用超声波点云数据进行特征提取与匹配,结合IMU数据实现初步位姿估计;通过识别已访问区域的特征模式,修正累积误差,进行回环检测,提升地图一致性;后端优化采用图优化算法(如位姿图优化),对机器人轨迹与地图进行全局一致性调整,提高建图精度。
浪涌未来:Z1系列泳池机器人采用的是3D结构光、iTOF三角测距方案和超声波等的融合方案。其中,3D结构光技术可实现水中精细感知和精准建模,提升环境识别精度;iTOF三角测距方案凭借蓝绿光在水下环境的传播优势,可实现厘米级精度测距。据称,这套方案能让机器人智能识别泳池形状,包括异形泳池,实现优化分区和S形路线清洁,提升清洁效率。
智橙动力: 代表产品的Valor 系列P10、S10、V10 等,搭载三合一可视化雷达方案(激光 + 声纳 + 视觉)。
思傲拓等,采用了不少自研方案。这么做的好处是,与机器人的适配性更好,其次,成本能得到更好的控制。但也有一定挑战。
如有纰漏,欢迎指正。
3D视觉硬件,官网:www.3dcver.com

3D视觉学习圈子
「3D视觉从入门到精通」知识星球(点开有惊喜) !星球内新增20多门3D视觉系统课程、入门环境配置教程、多场顶会直播、顶会论文最新解读、3D视觉算法源码、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!
3D视觉全栈学习课程:www.3dcver.com
3D视觉交流群成立啦,微信:cv3d001