加入高工人形机器人行业群,加微信:17811613845,出示名片,仅限人形机器人及具身智能产业链相关企业


从理论到实践:三大技术革新颠覆行业认知
应手Y-Hand M1 基于任雷教授国际首创的“仿生拉压体机器人理论与技术”,通过对人体骨骼肌肉系统功能原理的二十几年深耕以及仿生机器人创新性工程化实践,在理论与技术层面实现了三大颠覆性创新。
一是颠覆传统刚性铰链式设计,重现了生物关节的三维6自由度自然运动,大幅提升了关节灵活性和柔顺性;
二是基于自研的磁集电驱人工肌肉重现了人体骨骼肌的生物力学特性,实现了高质量功率密度比的驱动,以及驱动、变速、传动一体化动力系统;
三是基于人体骨骼肌肉系统的仿生多层多级刚柔耦合系统设计,可以实现系统级的动力传输、能量管理和环境交互。

五位一体性能突破:重新定义灵巧手极限
在核心性能层面,应手Y-Hand M1 凭借一系列突破性表现,创下多项行业纪录,实现了 “力量、速度、精度、灵活、柔顺” 的五位一体突破,树立了仿生灵巧手领域的性能新标杆:
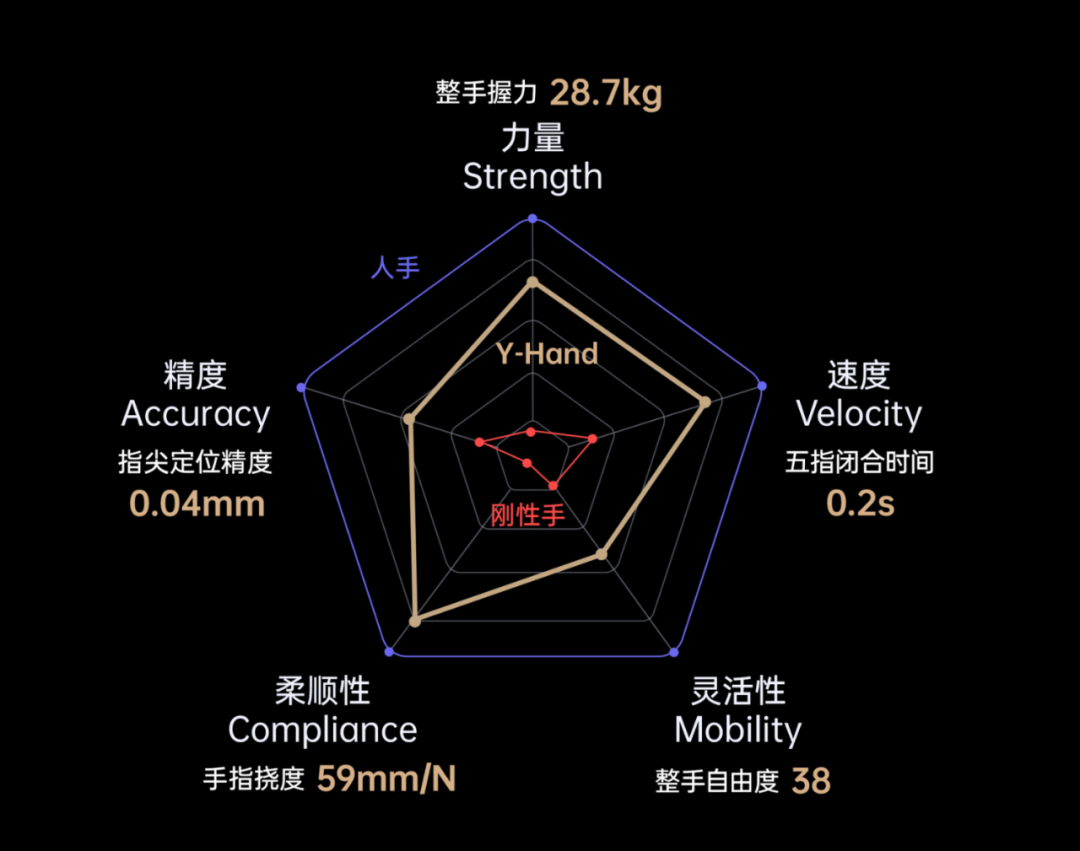
在力量方面,应手Y-Hand M1整手握力高达 28.7kg,是传统刚性灵巧手的 6 倍以上,足以胜任很多高负载的类人抓握与操控;

速度上,0.2 秒即可完成五指闭合,反应速度接近人手,是刚性灵巧手的 3 倍以上,大幅提升了操作效率;

精度上,单指指尖重复定位精度达到 0.04mm,为刚性灵巧手的 2 倍以上,能够完成很多类人精细操控,满足高精度作业需求;

柔顺性上,手指挠度为 59mm/N,具备出色的柔顺性,在接触人体、易损物品与外部环境时,能有效避免冲击与损伤,可以实现安全可靠的人机物理交互和环境交互;

灵活性上,整手具备 38 个自由度,是目前世界上自由度最高的仿生灵巧手,可完成复杂多样的类人灵巧抓握和操控。



这种全方位的性能突破,让应手Y-Hand M1 成功打破了技术领域与行业领域内“力量与速度难以兼顾”’、“高柔顺与高精度无法同时实现”、 “高负载与灵巧操控无法平衡”的困境,为智能制造、巡检运维、医疗健康、家政养老等领域带来了全新的解决方案。
例如在工业生产中,应手Y-Hand M1 能够胜任高精度装配环节的工作,替代人工操作,从而提高生产效率与产品质量;
在汽车智能制造领域,能够完成复杂线束插接、密封圈安装、精密零部件组装等高难度工序,通过替代传统人工流水线作业,大幅提升整车装配的一致性与生产效率,推动汽车制造向更高自动化水平迈进;
在高端电子设备制造中,应手Y-Hand M1 展现出卓越的超精细操作能力,可精准完成芯片引脚焊接、微型电容装配等工序,同时凭借高精度抓取能力处理微小电子元件并实现高速装配,有效降低了因人工操作误差导致的产品不良率,为高端电子器件的规模化生产提供了可靠的技术支撑。

从单品创新到生态布局:构建仿生科技矩阵
除了应手 Y-Hand M1,月泉仿生创新产品矩阵还包含信手X-Hand M1、博行 X-Bot、博文W-Bot 等一系列产品。这些产品共同构建起月泉仿生从手部精细操作到全尺寸通用具身智能的完整技术生态体系。

值得注意的是,不同产品之间的技术并非孤立存在,而是相互关联、协同发展。比如,博行 X-Bot 可搭载信手X-Hand M1或应手 Y-Hand M1,实现全身运动与精细操作的完美配合;信手系列与应手系列在触觉算法、驱动技术等方面相互借鉴,通过不断优化迭代,共同推动月泉仿生产品性能的持续提升。

未来展望:让仿生科技走进真实生活
未来,月泉仿生将继续秉持 “以生物智慧赋能科技创新” 的核心理念,在技术研发与场景应用两端持续发力。
在技术层面,进一步深挖仿生人形机器人的潜力,在运动能耗、类人灵巧操控、人机交互安全性等关键领域实现更大突破;在应用方面,加速技术成果的落地转化,深入拓展智能制造、巡检运维、医疗健康、家政养老等多个行业领域,让仿生科技真正走进人们的生产生活,为社会发展贡献更多力量。
从实验室到产业界,月泉仿生的创新成果不仅展现了中国仿生科技的原创实力,更让 “机器人像人类一样灵活工作” 的愿景迈出了关键一步。而应手 Y-Hand M1 的诞生,无疑为这场技术革命按下了 “加速键”。
关于月泉仿生
北京达奇月泉仿生科技有限公司,由中国科学院院士、吉林大学教授、国际仿生工程学会名誉理事长任露泉院士,与英国曼彻斯特大学终身教授、国家特聘专家、教育部长江学者任雷教授共同创立,依托任雷教授国际首创的“仿生拉压体机器人理论与技术”,开发能耗低、手臂操控能力强、人机物理接触安全性佳的高度仿生人形机器人。公司致力于推动仿生科技领域创新与突破,重点涵盖仿生人形机器人、具身智能机器人、仿生智能等重大产业领域,为仿生具身智能产业提供全新仿生解决方案。












