点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
来源:科研大匠
「3D视觉从入门到精通」知识星球(点开有惊喜) !星球内新增20多门3D视觉系统课程、入门环境配置教程、多场顶会直播、顶会论文最新解读、3D视觉算法源码、求职招聘等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

近日,有网友发帖称“大连科技学院全员停发工资,开学面临停摆”,引发关注。在帖文评论区,记者注意到有一封落款为“大连科技学院工会委员会”的《致全体教职员工一封信》。信中提到,在未收到任何法律文书和通知的情况下,学校各类相关账户被大连市中级人民法院冻结,致使7月工资未能如期发放。学校工会将为全体教职员工发放临时困难补贴和慰问补贴。
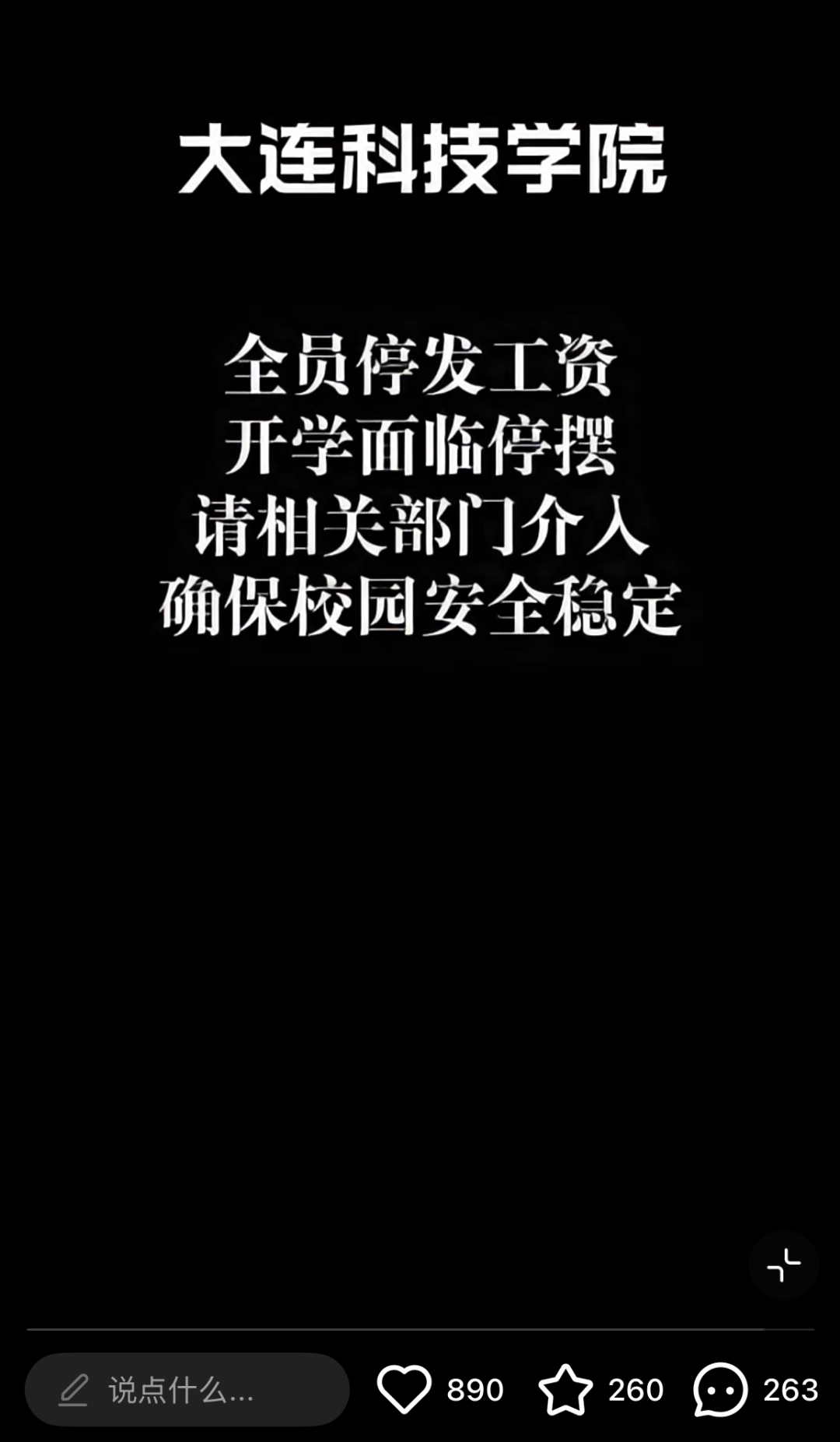
网友发帖称大连科技学院全员停发工资

评论区流传出该校内部信
8月23日,读特新闻记者以家长身份致电大连科技学院求证此事,学校院办工作人员证实网传的《致全体教职员工一封信》内容属实,但表示“现在学校已经在解决这个问题了,政府不可能让学校停止运行,我们老师马上都上班了。”同日,记者致电该校主管部门辽宁省教育厅,电话无人接听。
读特新闻记者注意到,《致全体教职员工一封信》的落款时间为8月5日。根据天眼查信息显示,大连科技学院共有2条被执行人信息,被执行总金额超2.3亿元;共有35条历史被执行人信息,被执行总金额超35亿元。其中,8月4日新增1则恢复执行信息,执行标的超1.3亿元,执行法院为辽宁省大连市中级人民法院。

大连科技学院2条被执行人信息,总金额超2.3亿元。

大连科技学院历史被执行人信息共35条,总金额超35亿元。

公开资料显示,大连科技学院位于辽宁省大连市旅顺经济开发区,是一所理工类民办高校。学院于2002年7月建校,前身为大连交通大学信息工程学院,是大连铁道学院与大连阳光世纪教育产业投资有限公司(下称“大连阳光世纪教育”)共同举办的独立学院。2011年,学校改制为民办普通本科大连科技学院。
“我收到的录取通知里要求10天内交齐学费。”一位该校新生告诉读特新闻记者,自己8月初就已交齐所有学费。大连科技学院的收费公告显示,该校本科专业学费为每年26000元-28000元,专科学费为每年18000元。8月17日,大连科技学院官方微信公众号发布2025年招生情况,已面向全国22个省份录取本科新生2900余人。学校目前在校生大约1.2万人。
一所高校,为什么能欠这么多钱?
记者梳理发现,大连科技学院背后的企业,大连阳光世纪教育同样官司缠身,而学校副董事长、常务副校长高小涵,是大连科技学院的法定代表人,同时也是大连阳光世纪教育法定代表人。目前,高小涵共有22条被限制高消费的记录,案件多集中在金融借款合同纠纷、债权转让纠纷、典当纠纷等。
一位大三在校生告诉记者,关于学校全员停薪的事,自己也是从网上看到,内部并未引起过多讨论,但是学校近期新装修了宿舍楼,并在招生季多次宣传寝室环境。


此前,该校还曾发布2025年招聘计划,招聘专任教师、专业带头人、辅导员等42人。
最后,给大家推荐一门3D视觉工坊最近新出的好课!《从0到1手搓一套六轴机械臂》基础课程,旨在帮助学员从零开始,系统构建机械臂的全流程认知,通过理论与实践相结合的方式,让学员不仅掌握机械臂的核心原理,更能亲手搭建并控制属于自己的机械臂系统,实现从理论到实践的跨越。
课程内容
从基础的坐标变换、欧拉角/四元数入手,循序渐进地构建运动学/动力学模型;深入讲解正/逆运动学、雅可比矩阵、路径规划等关键知识;
全流程覆盖从仿真到实物控制实现,涵盖URDF模型导出、PyBullet仿真、关节电机控制、电机补偿、零位标定、定时任务等;
理论结合实践,每一个知识点配套仿真/实操,避免纸上谈兵,真正做到「学完就能上手」;
不仅让你理解系统架构,更带你写出能跑的程序,驱动真实机械臂动作,为日后从事机器人研发、医疗机器人系统开发、科研竞赛打下坚实基础。
主讲介绍
 派派
派派
南方科技大学本硕博
南方科技大学本硕博,具备多年机械臂系统实物开发经验,从事机械臂相关创业多年,擅长机械臂建模与参数辨识、逆运动学与动力学算法设计、传统机械臂控制、以及机械臂实物平台的结构设计与软硬件集成。
课程大纲






课件展示(部分)



面向对象
机械臂初学者:希望系统学习机械臂理论与实战开发的高校学生、研究生或刚入门的工程师,本课程会从基础开始讲起,所有的内容都会有源码支持; 机器人方向的工程开发人员:想要构建属于自己的或者公司的机械臂系统,课程会涵盖部分工业机械臂开发经验; 竞赛与项目开发者:准备参加机器人类竞赛,或正进行相关科研/工程项目的同学; 转型的嵌入式/软件工程师:希望从控制、仿真或软件开发方向切入机器人系统,拓展职业能力边界。
课程特色或亮点
理论结合实战,逐步搭建完整系统
课程以「边讲边做」讲解机械臂核心知识,将复杂的运动学与控制理论拆解为可实践的代码模块,以可运行实战支撑每个概念,助力学员从零构建可控机械臂系统。
系统覆盖从基础建模到实物控制全过程
覆盖坐标变换、正逆运动学等核心机器人学知识,完整介绍从URDF建模到实物调试的全过程,实现「理论 + 仿真 + 实物」一体化教学。
大量图示与动画辅助,帮助理解空间思维
针对齐次变换、欧拉角等抽象内容,课程配有图形演示、动态动画与可交互代码,帮助学员建立直观三维空间概念,降低学习曲线。
代码可跨平台,提供解析解源码,高效运算
不依赖ROS之类的第三方工具,支持部署到嵌入式开发板、windows或者其他系统中,比较适合想做产品的学员学习。
学后收获
本课程作为机器人学基础课程,所有内容都会配有代码和仿真模拟,为后面动力学、机器人应用课程打下坚实的基础;
系统掌握机械臂建模,运动学与控制等核心理论知识、理解机械臂工作原理与控制流程;
构建一套完整的机械臂仿真与实物控制系统,从建模、轨迹规划到控制策略落地;
掌握机械臂实物开发核心流程,包括DH参数标定、电机控制、轨迹追踪等,具备独立搭建控制系统的能力。
开课时间
2025年8月30日晚8点开课,开课后每周更新一章节,提前购买课程的学员可提前学习已更新的课程学习资料!
答疑服务
课程答疑主要在本课程对应的鹅圈子中答疑,学员学习过程中,有任何问题可以随时在鹅圈子中提问。


备注:以上图片和视频部分来自网络,如果侵犯了您的权益,还请联系删除!
版权声明