点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
3D视觉工坊很荣幸邀请到了清华大学计算机系博四在读诸子钰,为大家着重分享他们团队的工作:MTU3D。如果您有相关工作需要分享,欢迎文末联系我们。
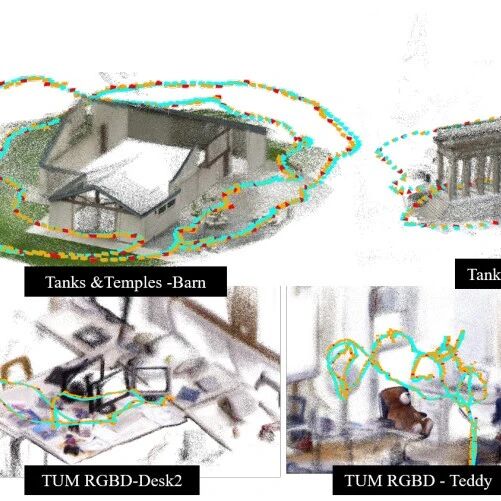
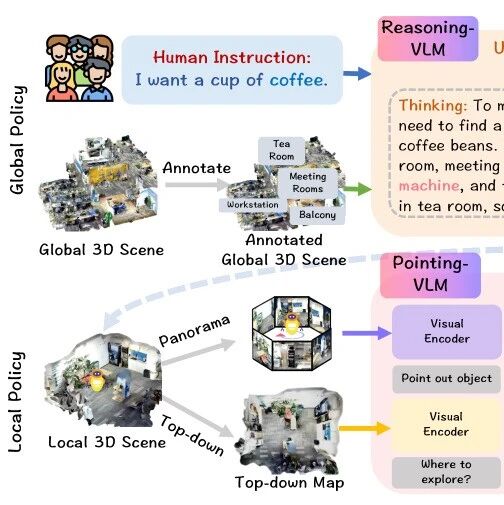
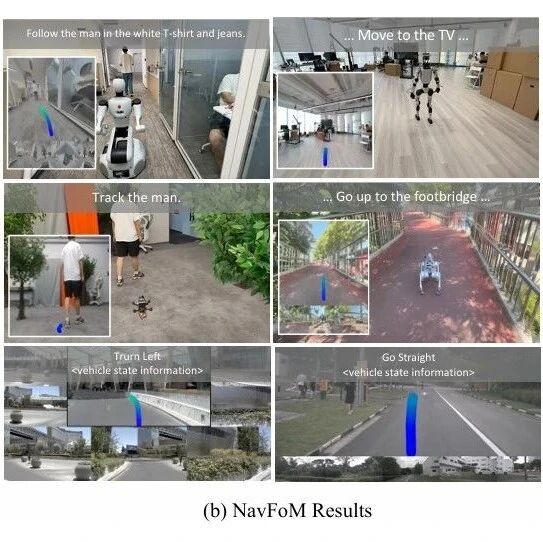
 Move to Understand a 3D Scene: Bridging Visual Grounding and Exploration for Efficient and Versatile Embodied Navigation
Move to Understand a 3D Scene: Bridging Visual Grounding and Exploration for Efficient and Versatile Embodied Navigation
论文:https://arxiv.org/pdf/2507.04047
主页:https://mtu3d.github.io/
代码库:https://github.com/MTU3D/MTU3D
直播信息
时间
2025年08月26日(周二)19:00
主题
ICCV25满分论文| MTU3D统一空间理解与主动探索的具身导航
直播平台
3D视觉工坊哔哩哔哩
扫码观看直播,或前往B站搜索3D视觉工坊观看直播

3D视觉工坊视频号也将同步直播
主讲嘉宾
 诸子钰
诸子钰
清华大学计算机系博四在读
清华大学计算机系博四在读,师从邓志东教授。 研究方向为3D空间理解,视觉语言学习,具身智能,空间导航。代表工作为3D-VisTA, PQ3D, MTU3D系列。
直播大纲
具身智能背景介绍,和3D空间理解的关系 3D空间理解的相关工作和难点分析 MTU3D是如何统一空间理解和主动探索的 实验结果和应用
参与方式

注:3D视觉工坊很荣幸邀请到了清华大学博士生诸子钰,为大家着重分享他们团队的工作。如果您有相关工作需要分享,
欢迎联系微信:cv3d009,请备注:宣传工作,则不予通过。