在微创手术机器人领域,操作精度与安全性是决定手术成败的核心要素。其中,原位力感知与反馈技术被视为核心技术,直接关系到手术的安全性、精确度与效率。
以直觉外科推出的达芬奇第5代腔镜手术机器人为例,该机型在2024年首次集成力反馈系统后,将术区交互力峰值降低43%,显著提升了手术安全阈值。即便美国FDA实施了销售限制,该机型在2024年仍实现商业化装机360台,占据美国腔镜手术机器人市场约50%的份额。

尽管原位力感知与反馈技术已成为手术机器人行业的技术制高点,但该技术仍面临多项技术挑战:一是受限于末端执行器的尺寸集成,现有力感知系统难以实现多维力的同位测量;二是传统电学传感器在CT/MRI兼容性、磁导航环境适应性以及液体介质稳定性等方面表现欠佳;三是对高温高压灭菌等常规消毒方式的耐受性有限,制约了其临床推广应用。
在此背景下,光纤布拉格光栅(FBG)传感器凭借其微型化封装、良好生物相容性和电磁免疫等优势,逐渐成为原位力感知技术的研究热点。然而,FBG传感器在实际应用中仍存在温度-应变交叉敏感导致的测量误差,以及温度补偿算法带来的系统复杂度增加等技术瓶颈。
▍首创栅区变径FBG多维力感知技术,实现力-温本征解耦与动态容错
面对上述技术难题,武汉理工大学李天梁教授团队联合北京理工大学段星光教授团队、北京大学人民医院刘海鹰教授团队以及香港中文大学任洪亮教授团队开展了联合攻关,并于近期取得了阶段性重要突破。
研究团队从外科医生操作手部“触觉感知”中汲取灵感,结合神经细胞孪生分裂演化机制,创新性地提出了一种栅区变径FBG传感微结构,用于实现手术机器人与组织交互力的高精度感知。分别研制了脊柱内镜手术机器人三维力感知执行器(量程 10N)与辅助骨科手术机器人六维力/力矩传感器(力量程 50N 力矩量程 1200N·mm)。通过镀层涂敷诱导FBG 光谱分裂形成孪生峰,从而实现温度与力的分离感知。相比传统单峰 FBG传感器,其力温耦合误差降低了50%。
针对手术机器人执行器的临床需求,研究团队采用激光微焊接封装技术,成功实现石英光纤与金属基底的异质材料高强度键合,使传感器可耐受180℃干热灭菌、长期水环境浸泡及重复使用,与依赖低温等离子灭菌的传统胶粘封装相比,成本降低80%以上。

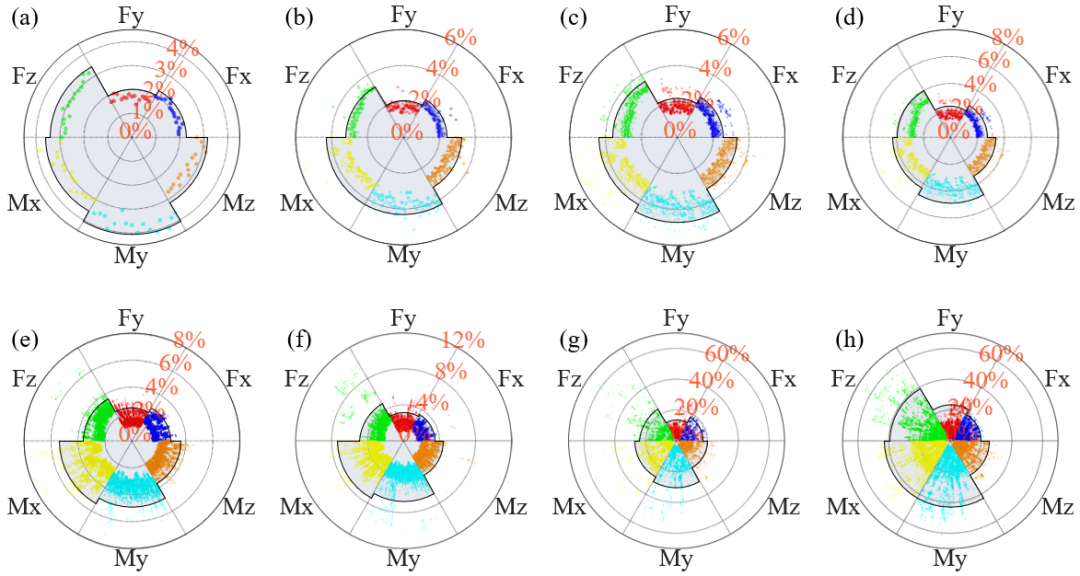
同时,研究团队还基于孪生波长的冗余数据,构建了光纤多维力传感器故障在线识别与动态容错解耦框架,有效提升了传感系统的临床可靠性。该框架在单支FBG损坏或光谱啁啾失真的情况下将测量误差降低至4.42%以内,相比常规无容错的多维力解耦方法,将三维力与六维力容错恢复率从零分别提升至40.23%与25.7%。
为验证所提出光纤多维力原位感知技术在临床中的适用性,研究团队开展了系统的应用验证研究。该技术已成功集成至经皮脊柱内镜机器人和骨科辅助手术机器人平台,并在猪脊柱模型(L3-L5节段)及人体尸体颅骨组织上进行了严格的性能测试。实验结果表明:一是微型化设计使传感器尺寸最小可达4mm,满足微创手术的空间限制要求;二是经过11次180℃高温灭菌循环后,测量误差仍能控制在5%以内,展现出优异的复用稳定性;三是创新的栅区变径设计实现了力-温度的高精度解耦;四是先进的动态容错算法确保了在部分光纤失效时测量的可靠性。这些数据充分证实了团队所提研究成果的优越性能。
近期,团队的两项重要成果已分别以学术论文形式正式发表。其一题为“3-axial force Self Fault-tolerant Decoupling of Surgical Forceps Integrating Step-coated FBG for Spinal Endoscopic Robot”,刊发于《IEEE Transactions on Automation Science and Engineering》;其二题为“Step-coated FBG and Runway-shaped Beam 6-D F/T Sensor with Dynamic Self-fault-tolerant for Orthopedic Surgery Robot”,发表在《The International Journal of Robotics Research》。两篇论文第一作者均为赵琛,通讯作者均为李天梁教授。
▍四大改进与创新,提升力感知系统性能与可靠性
通过传感结构创新、封装工艺改进、精度校准方法和智能算法的协同优化,研究团队在手术机器人多维力感知技术方面取得了系统性突破,显著提升了力感知系统的性能和可靠性。具体而言:
栅区变径微结构:破局传统FBG对热-力串扰感知模式
在传感结构方面,研究团队通过镀层诱导栅格间距发生改变,成功形成了具有孪生波长反射特征的栅区变径结构。相比于传统力感知敏感结构,该栅区变径结构以单FBG双信号形式提升温度-应变解耦能力,并在光纤损伤情况下增强了容错测量能力。

封装工艺革新:突破光纤力感知执行器临床应用瓶颈
在封装技术方面,研究团队采用激光焊接封装工艺代替传统胶粘工艺,为石英光纤与金属弹性体等异种材料高可靠连接难题提供了解决方案。团队所研制的传感器能耐受术前180°C高温灭菌与术中水环境侵蚀,并且在消毒后可重复使用超过10次,经过长期存储后测量误差仍低于5 %,有效解决了光纤力感知执行器械在复杂临床环境下的适应性难题。

在机精度快速自校准:解决多次消杀复用下测量精度易失准问题
考虑到传感器在安装应力扰动与长期服役过程中可能引起的标定状态改变和测量精度失准的问题,研究团队提出了经纬变化加载的手术机器人腕部多维力在机快速校准方法,通过将光纤多维力传感器与参考传感器对应坐标轴连接后,使用机械臂带动光纤多维力传感器进行空间轨迹移动获取在即标定波长与参考力数据,结合在机标定数据对标定矩阵进行快速校准,实现长期服役过程中光纤多维力传感器测量精度维护。

算法自容错处理:提升手术操作过程力感知可靠性
在算法层面,研究团队提出了小波模糊熵算法对波长信号进行实时解析,实现了光纤多维力传感器链路断裂、光谱啁啾等故障行为的在线识别,并结合最小二乘法矩阵库线性容错解耦与极限学习机非线性解耦,实现自适应输入通道调度,确保在部分FBG损坏情况下仍可输出可靠的力/温测量结果。
基于上述四项改进与创新,研究团队设计并制造了六轴力/应变传感器,并通过优化传感单元和跑道形梁的结构参数,增强了传感器的各向同性、灵敏度和固有频率。

同时,针对钻具自重干扰测量精度及骨钻孔振动导致力容差失效的技术难题,研究团队将光纤多维力传感器输出波长信号接入MCGRU模型,实现手术交互状态识别,可自主识别骨钻穿透及皮质-松质层间过渡等关键阶段。构建了基于突破力检测与反馈功能的手术机器人辅助钻孔系统,实现骨科手术机器人对钻头突破状态实时检测与推进深度的自主精细调控,有效避免误伤骨下神经组织或硬脑膜。
▍多重实验验证,证实力传感系统测量有效性
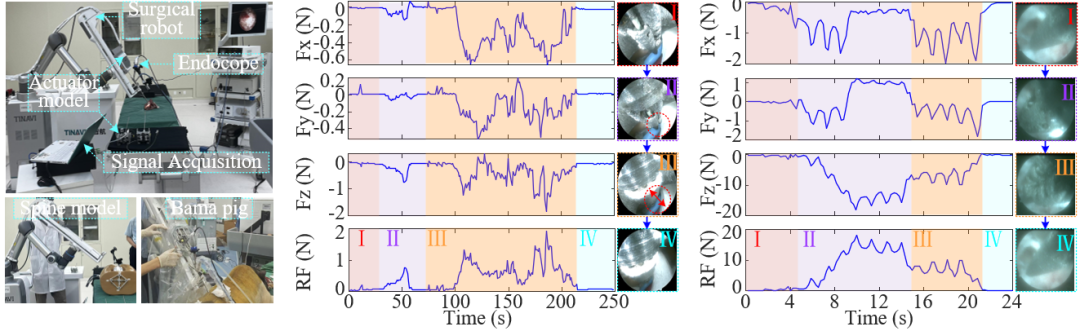
通过将栅区变径FBG集成于手术执行器中,研究团队成功研制出具有三维力感知功能的智能手术夹钳、剥离子,以及具有六维力感知功能的骨科手术钻等工具。该装置通过实时监测器械-组织交互力,为经皮脊柱内镜手术机器人提供了精确的力反馈信息,还确保了骨科手术机器人钻孔过程骨下组织安全。在系统集成验证阶段,研究团队首先将光纤力传感器与脊柱内窥镜手术机器人于骨科辅助手术机器人进行机电一体化整合,随后通过模型实验、活体动物实验与尸体实验的双重验证,证实了该力传感系统的测量有效性。
腔镜模型实验
为全面评估系统的临床应用价值,研究团队设计了阶梯式的实验验证方案。搭建了腔镜手术模拟实验装置,通过腔镜内组织切除、缝合以及剥离等操作。为量化力反馈系统的临床效益,研究团队还设计了对照实验。在腹腔镜模拟手术中,无力反馈组操作者施加的组织提拉力均值达5.6N(超过安全阈值47%),而启用力反馈功能后,操作力可稳定控制在3N以内(标准差0.33N)。在组织缝合验证中,系统测量值与标准力传感器的相对误差仅为1.9%,证实了其具备临床级测量精度。

活体动物实验
在活体动物实验中,选用解剖结构近似人类的巴马猪开展脊柱内窥镜手术验证实验。实验过程中,光纤力感知手术执行器成功完成了组织探测、神经根剥离等精细操作,测量到的最大操作力始终控制在2N以下,充分体现了其在微创手术中的力控优势。对比实验发现,当器械与骨骼发生意外接触或受呼吸运动干扰时,系统能及时捕捉到力信号的异常波动(最大瞬时值18.6N),这一功能为术者提供了重要的安全预警信息。
尸体实验
为进一步模拟临床手术条件,研究团队在尸头颅骨上进行了辅助钻孔突破检测实验。实验过程中在突破的阶段,光纤六维力感知骨科手术钻头均很好的检测到了交互力降低的时刻,通过力反馈程序成功在骨组织钻穿前控制钻头退回,降低了骨下硬脑膜的损伤风险。提高了骨科辅助手术机器人智能化水准,并为骨科机器人从辅助操作到自主化手术操作发展提供了经验借鉴。

上述系列实验不仅验证了该力传感系统的可靠性,更重要的是解决了光纤传感器在医疗应用中面临的高压蒸汽消毒的耐受性、体液环境下的长期稳定性以及动态力测量的准确性三大关键技术难题,为手术机器人力感知技术的发展提供了完整的解决方案,对推动国内医疗机器人技术革新具有重要的临床意义。
参考文章1:
https://journals.sagepub.com/doi/abs/10.1177/02783649251328373
参考文章2:
https://ieeexplore.ieee.org/document/11062870/authors#full-text-header
如需咨询企业合作事宜,欢迎联系机器人大讲堂-客服(19560423866,手机与微信同号)进行对接。
----------------END-------------------

工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 非夕科技 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 盈连科技 | 集萃智造 | 优傲机器人 | CGXi长广溪智造 | 阿童木机器人 | 极智嘉
服务与特种机器人企业
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 磅客策 | 柏惠维康 | 迪视医疗 | 水木东方
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 中科深谷 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 理工华汇 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技| 智身科技 | PNDbotics
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 擎朗智能 | 戴盟机器人 | 视比特机器人| 星海图 | 月泉仿生
核心零部件企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 鑫精诚传感器 | 蓝点触控 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 锐驰智光 | NOKOV度量科技 | 因克斯 | 褔德机器人 | 巨蟹智能驱动 | 微悍动力 | 凌云光 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代 | Xynova曦诺未来
教育机器人企业
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态,添加微信“robospeak2018”入群!


看累了吗?戳一下“在看”支持我们吧