温馨提示:点击下方图片,查看运营团队最新原创报告(共235页)
温馨提示:点击下方图片,查看运营团队最新原创报告(共235页)
正文:
2亿融资后,“旷视系”具身智能机器人创企[原力灵机]又完成新一轮融资!
2025年8月27日,据企查查显示,“旷视系”具身智能机器人创企[原力灵机(重庆)智能科技有限公司](以下简称“原力灵机”)发生工商变更,新增股东正景基金、洪泰基金、联想创投、锡创投和蔚来资本,疑似完成新一轮融资,目前并未官宣(小编视角:新一轮融资可能还没有正式变更或交割完成,投资方可能披露不完整或有错,等待企业官宣,以后续企业官宣为准)。

至此,半年时间内,公司已完成两轮融资,上一轮融资可追溯到2025年3月26日,公司完成2亿元天使轮融资,投资方包括君联资本、九坤创投、启明创投、渝富基金和常盛投资;目前君联资本是公司团队以外最大外部股东,持股8.3%。
半年时间不到,已完成两轮数亿级别融资,这家由“AI四小龙”之一[旷视科技]联合创始人们和早期核心技术骨干联合创立的具身智能机器人创企[原力灵机]有何魔力?

[原力灵机](公司全称“原力灵机(重庆)智能科技有限公司”)于2025年3月6日重庆注册成立(北京主体公司已于3月17日注册成立),核心创始成员为[旷视科技]早期核心技术骨干:范浩强、周而进和汪天才,公司致力于通过算法驱动、硬件联合设计与场景闭环的协同创新,让机器人成为生产力的重要组成部分,进而实现通用人工智能(AGI)在物理世界的落地应用,是行业内少有的能够实现大模型技术与机器人场景深度融合的具身智能公司。
据企查查显示,[原力灵机]前三大股东,分别是原力聚合(重庆)信息技术有限公司、灵机启原(重庆)、灵机拓原(重庆),其中原力聚合的法人为旷视联合创始人杨沐且蚂蚁集团是最大股东,灵机启原和灵机拓原的实际法人为旷视联合创始人唐文斌(现旷视科技法人、原力灵机联创兼CEO),因此[原力灵机]可以称为[旷视科技]早期创始团队的再创业。
核心创始团队(旷视科技核心创始成员及技术骨干):
(联创兼CEO)唐文斌:现旷视科技联合创始人及公司法人;(注:“AI四小龙”之一[旷视科技]由印奇、唐文斌和杨沐三位清华“姚班”毕业生于2011年北京注册成立,累计融资约139亿元,折戟IPO后,目前业务收缩、转型;三位联创于2025年1月把持有的全部旷视科技股权出质给了重庆产业投资母基金)
(联创、公司法人)范浩强: 高二获得清华大学“姚班”保送资格,于2017年毕业于清华“姚班”,被同龄人称为“神一般的存在”,大学四年学习成绩始终第一名;2010年10月(高二),应清华大学信息学总教练唐文斌的邀请,成为了旷视科技的6号员工,开启创业之旅,并“兼职”读姚班;毕业后,范浩强选择继续留在旷视;25岁时,他成了旷视研究院的算法总监,带领着70人的研发团队,在图像算法、团队培养、商业化等方面获得了显著突破,并在人脸识别、人脸检测方向拿下多个顶会级别比赛的世界第一;
(联创兼CTO)周而进:初三“保送”清华、高二夺得NOI金牌、高三夺得IOI金牌,放弃“姚班”于2011年进入清华大学电子工程系;毕业后,作为第12号员工加入旷视科技任高级研究员,年仅27岁便担任人脸识别研究组负责人,负责组建并带领旷视人脸识别研究组;2019年底,开始带领团队研发算法生产平台;
(联创)汪天才:2013年入学西南大学,后加入旷视担任高级研究员。在人工智能、计算机视觉领域深入钻研,主导构建了端到端多目标追踪框架 MOTR 系列、端到端 BEV 感知框架 PETR 系列;
一是原来机器人出身的创始团队,更关注机器人硬件能力,主要围绕控制和电机;硬件派的核心是机器人本体(人形/四足狗),其次是机器人的臂或关节;波士顿动力和宇树科技是典型代表;
二是软件背景的团队,更关注机器人的智能化和泛化能力,但“软”还可以进一步细分:上一波AI热潮中的创业者,转型至机器人领域,比如CV、强化学习;真正大模型背景的玩家,这波人更少;
核心技术:全栈自研,端到端具身算法方面进展迅速
原力灵机打造了完整的具身智能技术栈,从大模型到机器人硬件,实现端到端的智能控制:
2024 年底,公司正式成立前,研发团队就基于自研的 VLA 模型在机器人学习的基准测试平台— RLBench 的跨任务测试中取得了良好的成绩,成为中国首个做到上百种任务平均成功率超 90% 的具⾝智能公司,同时还在自研的机械臂和灵巧⼿上做到了真机复现。
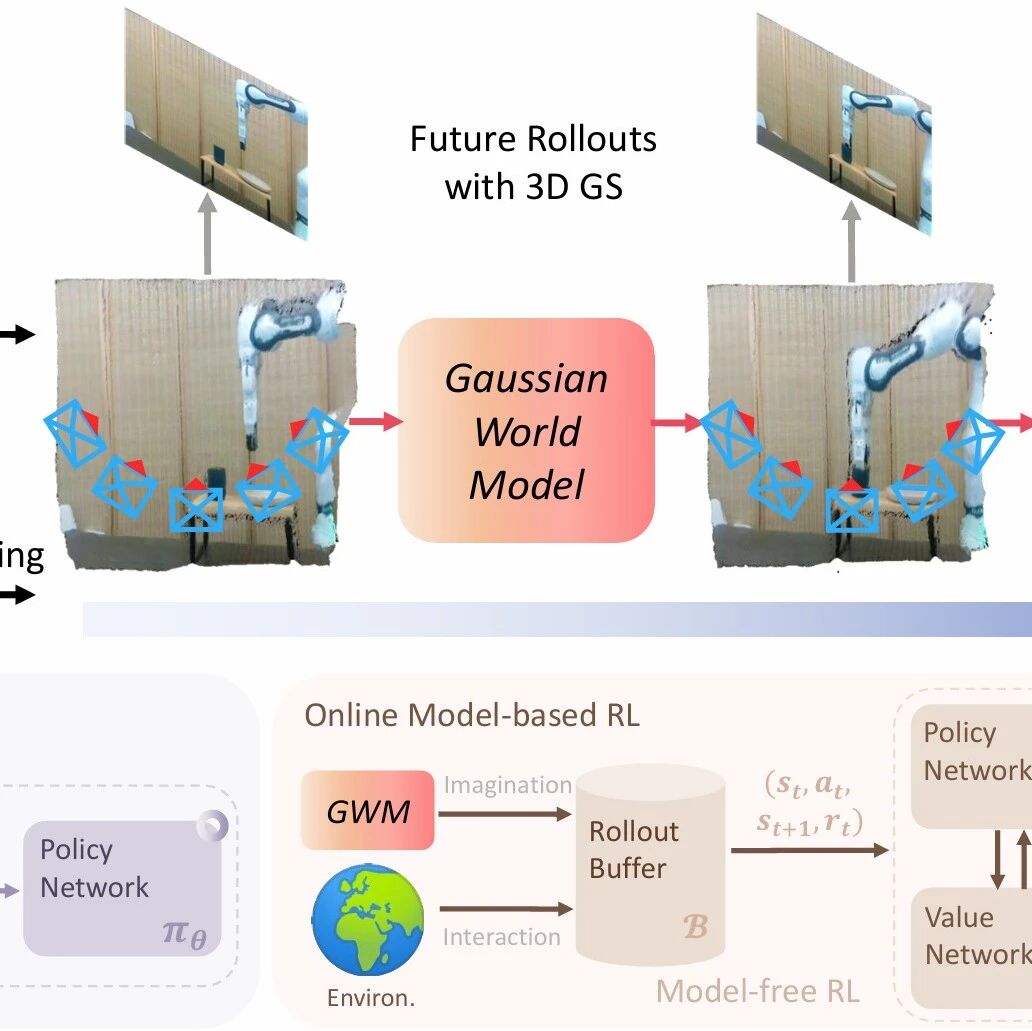
目前公司拥有自主研发的端到端多模态具身大模型 (MMLA: Multi-Modality Large language-action Agent) ,能够深度融合多传感器、大语言模型 (LLM)、视觉语言模型 (VLM)、视觉语言动作模型 (VLA) 与世界模型的底层能力,实现跨场景、跨任务、跨构型的智能泛化。
在今年5月举办的全球机器人视触融合挑战赛(ManiSkill-ViTac 2025)(机器人领域公认的顶级赛事)上,全球42支团队参与,国内两家具身智能创企包揽三个赛道金牌;其中,[原力灵机]拿下「纯触觉操控」和「触觉传感器设计」两个赛道金牌,[它石智航]获得「视触融合操控」赛道金牌。

值的注意的是,和[原力灵机]一样,[它石智航]没有产品推出的情况下,成立仅5个月时间,已获得累计超17亿元两轮融资,成为国内具身智能领域创企天使轮最高融资记录。
人形机器人赛道的共识是长周期和广大前景,对于人形机器人创企来讲,目前生产出人形机器人本体并不难,通过战略合作、实现营收也不难,难在批量化生产和实现场景真正、有效应用;同时号称软硬件全栈自研的技术壁垒仍旧有待商榷,目前来看众多具身智能领域创企并没有哪家实现真正护城河,作为核心瓶颈的机器人“大脑”要想实现突破,仍旧道阻、路长。
有关具身智能创企面临困境、发展乱象等详细解读,已放到知识星球“机器人头条”(点击后方链接,加入星球查看):【原创】人形机器人创企们,下一阶段的故事怎么讲?
接下来,小编从算力、软件算法、数据、硬件(核心零部件)、工程化等多层面,详细盘点人形机器人商业化卡点;并从人形机器人企业产品(进展)、硬件设施(生产能力)、产品落地场景、企业官方宣布量产时间、实际商业化进展、具身智能大模型技术等方面,盘点全球(含国内)人形机器人企业现况。
... ... ...
本文内容仅展示一部分,更多详细解读,点击查看完整版文章:【原创】人形机器人商业化卡点(人形机器人创企九死一生),加入知识星球“机器人头条”,与1100+位行业从业者一起,深度探讨“具身智能&人形机器人”赛道;

具身智能赛道更多解读:
【原创】浅谈人形机器人创企自研机器人大模型,才是未来唯一出路!!
【原创】车企、产业链公司、智驾领域从业者,疯狂涌入具身智能赛道
【原创】ToB、ToC or ToG,全球人形机器人产品优选落地场景梳理
全球AI+Robotics领域,华人图谱(含具身智能赛道“师徒关系图”)