前言:笔者主要是对标题内容一系列的论文图纸收集整理和总结,便于大家在设计过程中集中参考!其中大部分论文都是包含图纸的,少部分只有论文或者只有图纸(声明:部分总结内容或图片可能使用AI工具优化!)(注:参考资料见文末)

一、焊接机器人毕业设计,含装配图,开题报告,说明书
1、开题报告
主要包括研究目的与意义(旨在通过设计训练技能,为工业设计提供参考等)、国内外研究现状(包括工业机器人发展背景、应用情况、焊接机器人技术研究方向、我国相关发展成就及应用分布等)、文献综述(焊接机器人定义、结构形式、驱动方式,我国焊接生产自动化发展历程及机器人产业道路等)、拟采取的研究路线(查阅资料、调研、方案论证等)、进度安排以及参考文献和外文文献翻译要求等。

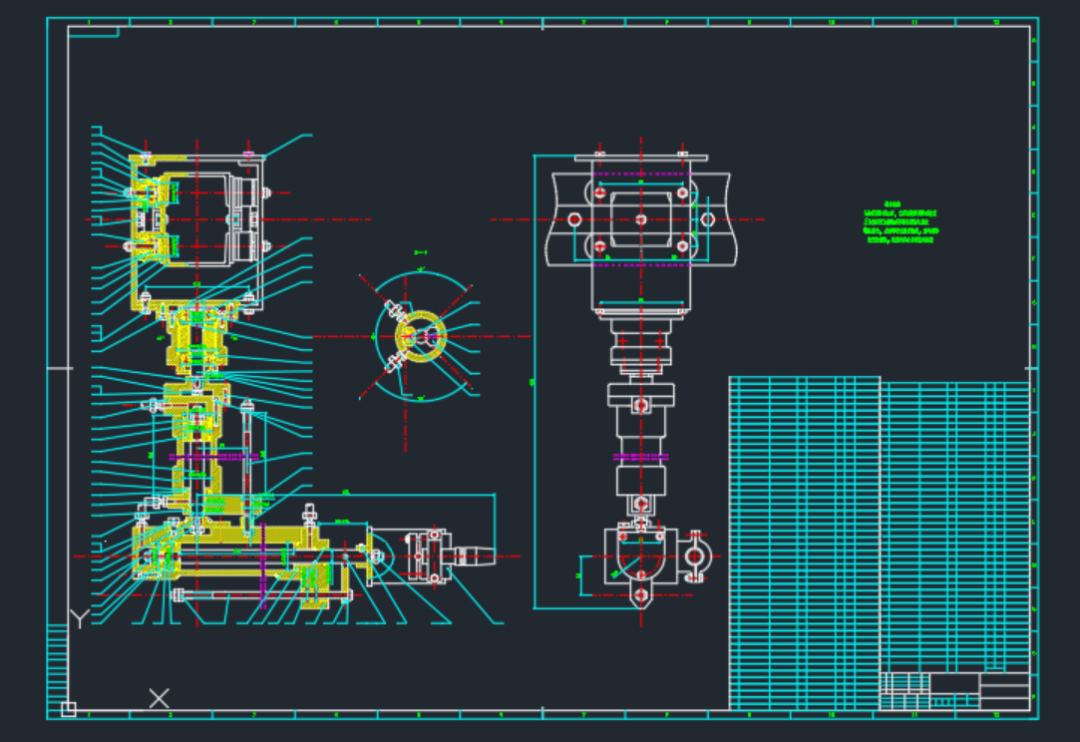
2、焊接机器人设计说明书
说明书总结:随着科技与工业需求发展,焊接技术对产品质量影响重大,国内焊接机器人应用规模与需求差距大,故研究推广其技术很有必要。本设计重点运用机械原理和制造装备设计方法,在了解国内外现状基础上,掌握焊接机器人内部结构和工作原理,对手臂、腕部进行结构设计,合理布置液压缸,同时研究其机械系统运动学及运动控制学,旨在为工业设计提供多方面参考,且该机器人具备刚性好、位置精度高、运行平稳的特点。说明书先介绍总体方案,设计分系统分析和技术设计两阶段,确定 4 个自由度(腕部回转、小臂伸缩、大臂回转、大臂伸缩),选用直角坐标系,采用液压驱动,由执行机构(手部、腕部、臂部、机身、滑轨)、驱动机构和电磁控制机构组成,并明确了技术参数。接着详细阐述腕部、臂部、机身的设计及计算:腕部按紧凑、轻量等要求,选 1 自由度回转结构,用液压驱动,计算确定驱动力矩、液压缸尺寸及螺钉型号;臂部以承载大、精度高等为要求,选液压驱动伸缩机构,计算驱动力、液压缸尺寸,且活塞杆强度和刚度达标;机身采用回转缸置于伸缩缸之上的结构,计算回转机构驱动力矩、尺寸,升降机构的偏重力矩、不自锁条件、驱动力,还选择了合适轴承。最后总结,该设计解决了诸多问题,结构可靠,稍作改进可满足需求

说明书截图

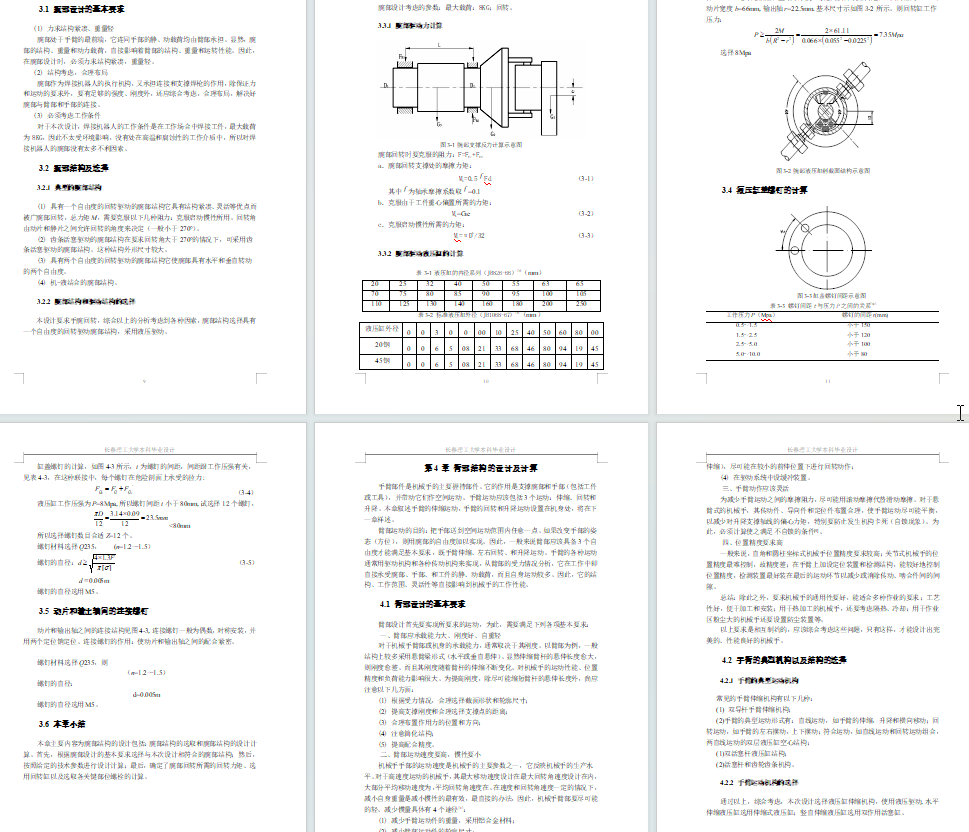
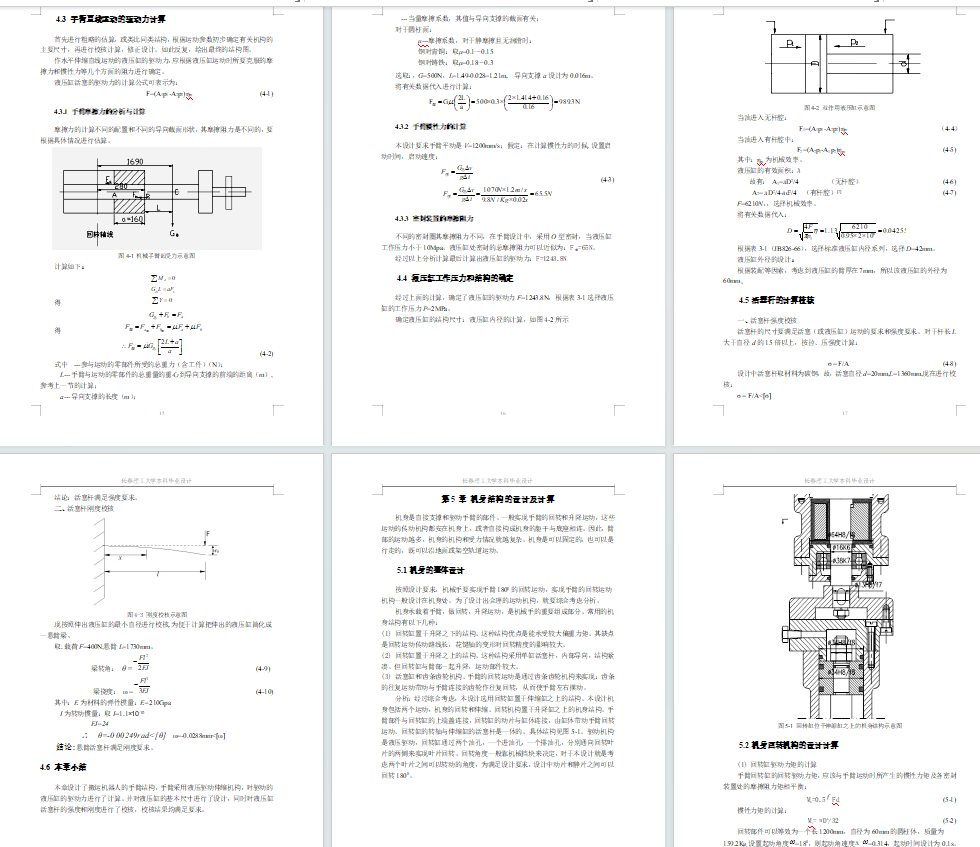

图纸示意图


二、机械手-集装箱波纹板焊接机器人机构运动学分析及车体结构

该文档围绕集装箱波纹板焊接机器人展开研究,旨在解决大型结构件现场焊接自动化难题。随着工业发展,大型焊接结构件应用增多,现场焊接需求大,但现有移动焊接机器人自主性低,缺乏自主运动规划能力,传统自动焊专机因焊枪无法随波形调整角度和速度夹角,导致集装箱波纹板直线段与波内斜边段焊缝成形及质量不一致。
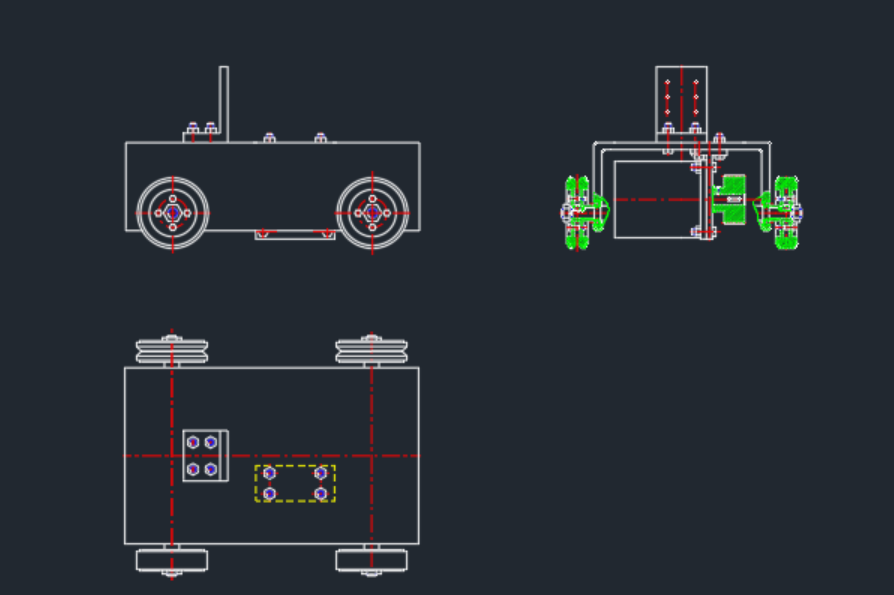
本课题主要完成三方面工作:一是机器人运动学逆解,采用三个运动关节(左右平移的本体、上下平移的十字滑块、摆动的末端效应器),通过齐次坐标变换方法,求解一个周期内各关节运动规律及函数关系。在波纹一个周期的不同阶段(如 AB 过渡段、BC 波内斜边段等),明确旋转关节的运动角度(如逆时针或顺时针旋转 2α 等),确保焊接速度相对焊缝恒定,焊枪与焊缝保持垂直,以解决焊缝成形不一致问题;二是车体结构设计,基于小车受力分析,确定传动方案为电机经圆柱齿轮、固定齿条将旋转运动转化为直线运动,完成车轮和车体设计;三是电机选择与齿轮校核,选用杭州日升 130BYG2501 永磁感应子式步进电机作为传动电机,Maxon DC Motor F2260(配特定减速箱和编码器)作为摆动关节电机,并对直径 80mm、齿宽 35mm、模数 1 的齿轮进行校核,以满足操作要求。文档还指出,移动焊接机器人未来将向采用视觉传感器、多传感信息融合技术及智能控制技术的方向发展。





三、机械手-集装箱波纹板焊接机器人机构运动学分析及车体结构设计

该文件围绕三自由度焊接机器人的运动学分析展开,重点探讨运动学逆解问题。首先概述了机器人运动学分析的基本概念,指出正向运动学是由关节变量求末端位姿,逆解则是由末端位姿求关节变量,且逆解对机器人运动规划和轨迹控制更重要,本文即需通过逆解求三个关节的运动规律。接着介绍了运动学分析的数学基础 —— 齐次变换(D-H 变换),包括齐次坐标的定义,将三维点(a,b,c)表示为(a,b,c,1),以及齐次变换的分解,可分为旋转的方向余弦阵和平移的位置向量,还提及平移变换和旋转变换的特殊情况。随后建立了变换方程,基于机器人运动简图,明确三个关节(左右平移的本体、前后平移的十字滑块、旋转的末端效应器)的运动原理,推导出总变换矩阵 T₃₀=T₃₂・T₂₁・T₁₀,并得到焊枪末端坐标的变换方程。在运动学分析处理方法上,采用替换处理(转折点用半径 R 圆弧替代,R 与 α 角负相关)和衔接处理(过渡段分三小阶段)以保证运动连续和平滑过渡。最后详细阐述了逆解过程,以波纹的一个周期为研究对象,分 AB 段(过渡段 1)、BC 段(波内斜边段 1)、CD 段(过渡段 2)、DE 段(直线段 1)、EF 段(过渡段 3)、FG 段(波内斜边段 2)、GH 段(过渡段 4)、HI 段(直线段 2)等阶段,分析各阶段旋转关节的状态及关节 1 和关节 2 的速度方程,得出三关节协调运动可保证焊接质量,过渡段处理能实现运动平滑衔接的结论。




参考资料(已汇总在Excel里,按文章标题关键字查找自取!)

焊接机器人毕业设计,含装配图,开题报告,说明书

机械手-集装箱波纹板焊接机器人机构运动学分析及车体结构

机械手-集装箱波纹板焊接机器人机构运动学分析及车体结构设计


Tips2:评论区留言所需资料,找到就发出来!