一、有一个经典笑话,一个人带着指南针迷路了:“我知道北在哪儿,可是我在哪儿啊?!”所以要完成导航,需要知道我在哪儿,还有北在哪儿,如果有目的地的话,还得知道目的地在哪儿,从而告诉用户,通往目的地的道路。其中,我在哪儿是非常重要的。

其实,惯性导航的基本原理大致这样:你知道自己的初始位置,知道自己的初始朝向(姿态),知道自己每一时刻如何改变了朝向,知道自己每一时刻相对朝向是怎样走的,把这些加一起不停地推,走一步推一步,在不考虑各种误差时,得出的结果就应该正好是你现在的朝向和位置。但是要怎么知道自己的方向和位置是怎么改变的呢?不同的导航系统用不同的传感器,有不同的方法,惯性导航使用的是惯性器件:加速度计和陀螺仪。
二、加速度计测量加速度,测量物体的“惯性力”;陀螺仪测量角速度,是载体相对于惯性空间的旋转角速度:两种器件协同工作,陀螺仪测得的角速度进行积分后可以得到载体的姿态(俯仰、滚转),加速度计测量值结合当前姿态,扣除重力分量后,就可以得到真实的运动加速度,再对其积分可以得到速度,二次积分就得到位置。
1.ADIS16507-2BMLZ:三轴数字陀螺仪,±125°/s、±500°/s、±2000°/s动态范围;三轴数字加速度计,±392m/s2动态范围;
2.ADIS16507-3BMLZ:三轴数字陀螺仪,±125°/s、±500°/s、±2000°/s动态范围;三轴数字加速度计,±392m/s2 动态范围;
3.ADIS16470AMLZ:三轴数字陀螺仪,±2000°/s动态范围;三轴数字加速度计动态范围:±40g。

凭借超优秀的陀螺和加计参数,ADIS16470AMLZ可以完全替代目前最流行的入门级ICM-206XX,专为中高端的无人机保驾护航,且已经被各大开源飞控厂商纳入支持的传感器列表中。
1.基础概念:磁力计测量的是什么?
磁力计主要测量地磁场(地球自身产生的磁场)和环境磁场(如电子设备、金属物体产生的磁场)的合磁场,输出通常包含三个维度的分量(对应X、Y、Z轴),单位为微特斯拉(μT,1μT = 10⁻⁶特斯拉)。在地球表面,地磁场强度约为25~65μT,赤道附近约25~30μT,南北极附近约60~65μT。

2.磁力计值的具体含义
1)三维分量:每个轴的数值代表该方向上的磁场强度,可正可负:正值 / 负值:表示磁场方向与该轴的正方向相同 / 相反;数值大小:反映该方向上磁场的强弱(绝对值越大,磁场越强)。若X=30μT、Y=-10μT、Z=20μT,说明X轴正方向有30μT的磁场,Y轴负方向有10μT的磁场,Z轴正方向有20μT的磁场。
2)合磁场强度(总磁场)
通过三维分量计算得出,公式为:
总磁场 = ((X² + Y² + Z²))1/2
其数值应接近当地地磁场强度(如中国大部分地区约40~55μT),若偏差过大,可能受环境干扰。
3.影响磁力计的因素
1)硬铁干扰:由固定在设备附近的铁磁性物质(如螺丝、磁铁)产生,会使磁力计值产生固定偏移(如X轴始终增加10μT)。可通过校准(如“8字校准”)消除。
3)电子设备干扰:电机、扬声器、无线充电线圈等会产生交变磁场,导致磁力计值波动。
五、推荐两款在无人机上使用的地磁传感器:
1.地磁传感器IST8310:
品牌:iSentek(爱盛)
型号:IST8310
封装形式:LGA-16
尺寸:3.0×3.0×1.0mm
工作电压:3.3V(1.72-3.6V)
工作温度范围:-40~85°C
接口类型:I2C(支持高速数据传输)
动态范围:XY轴±1600uT,Z轴±2500uT
线性度:1%(X轴),0.1% (Y轴,Z轴)
2.作为所在行业的领导者,PNI的RM3100地磁传感器是性能最佳的产品,能够实现三维空间的磁场大小测量,其性能比霍尔效应传感器高出几个数量级。

RM3100磁传感器套件
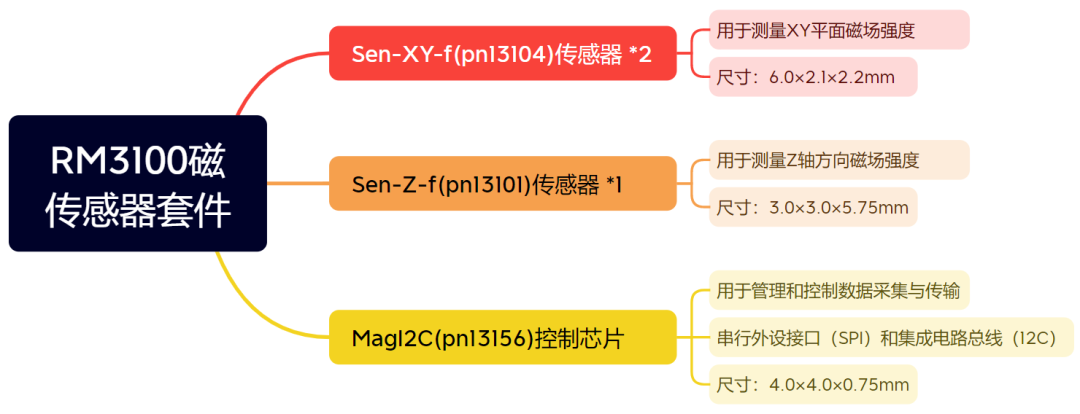
RM3100磁强计,专为复杂环境而设计,能够提供清晰、稳定和精确磁场测量,易于与PX4和ArduPilot等开源飞控系统集成开发。



如对以上推荐的传感器感兴趣,请联系:党生13718697783(同微信)。