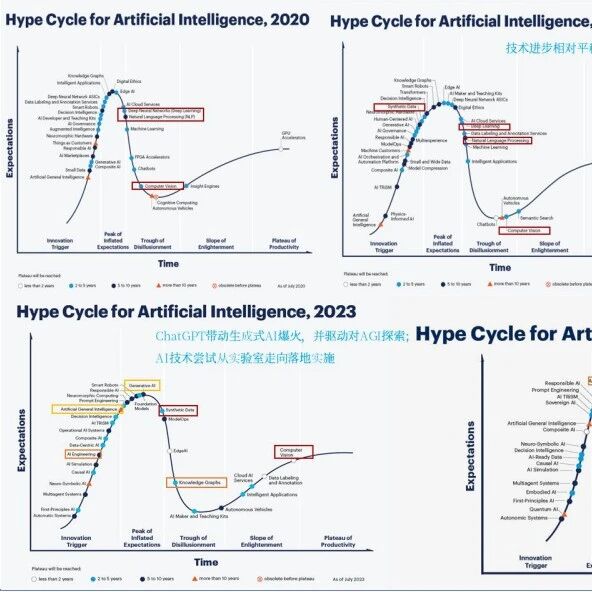
强化学习的主要功能与落地场景
说到具身智能机器人,无论是人形还是四足,都离不开的一个重要任务是步态控制,这也是迈向通用具身必须要攻克的难关。而目前主要方案即是强化学习,宇树、智元等公司的人形机器人大多通过强化学习完成对应任务,包括:爬楼梯、爬山、跑步、跳舞、翻跟头等各类高难度动作的学习,从而赋予产品能够适应救援、测量、危险环境的场景。
除此之外机械臂的VLA+RL方案在学术领域越来越受欢迎,RL让机器人执行的更高效、丝滑与顺畅。

然而,强化学习涉及内容众多,而且非常吃研究经验。体系较大、内容繁杂,很多小白根本不知道怎么入门,发出一篇论文更是难度极大。产出一篇符合对应标准的论文需要在方法论证、实验结果、写作方式等几个大模块上突击。哪一环节出错了,都可能导致审稿人的low score。
没有完整的学习体系,将会处处踩坑,久久不能入门,导致最终放弃学习,错失了机会。为了解决入门难、不知道怎么产出论文的痛点,具身智能之心联合业内专家,推出了强化学习领域的1v6论文辅导小班课。
适合对象:硕博生、需要论文指导的其他同学
班型:6 人小班|每周 1 次直播授课(视频录播保存)|配专属助教答疑
目标产出:论文IDEA确认 + 项目实现 + 实验指导+ 写作润色 + 初稿形成(RAL/ICRA/IROS/CoRL 等方向)
课程亮点
面向前沿:基于最新的IsaacLab仿真环境,紧跟学术/工业前沿 产出导向:每周里程碑 + 量化指标,结营即完成论文初稿。 三轨并跑:四足、人形、机械臂 三选一主线,根据学员各自方向确定研究主题。 工程到科研一体化:基于IsaacLab的仿真训练环境、可复现的baseline代码,提供真机部署参考代码。 安全与合规:实机安全事项、模型卡/数据卡、风险与伦理等。 小班强陪跑:组会 + 代码/实验复盘 + 写作修改建议。

学后收获
科研选题:按四足/人形/机械臂/VLA+RL 四个大方向提供 6+ 可创新的idea。 数据与基线:基于IsaacLab等最新仿真训练环境、SAC/PPO/BC/Diffusion Policy 等基线代码。 方法与工程:完整 sim2real/real2sim2real pipeline,机器人训练部署等模块可直接复用。 评测标准:成功率、能耗、步态、接触冲击、鲁棒性等指标;≥5 seeds 的统计显著性流程。 写作与投稿:结构化论文模板、统一图表体例、补充材料/视频清单、投稿与审稿回复辅导。 维护期:结营后 8 周论文维护(补实验、改图、润色与回复)。
即使自己没有成熟的idea,也能在给出的idea与 baseline 上迭代出一篇可投论文初稿。
课程大纲(14 周核心 + 8 周维护)
每周:1 次直播课(方法/论文)+ 课程录播 + 专属微信群答疑
Week1–论文方向与投稿分析
主要分析强化学习方向的顶会、顶刊要求,近年来趋势、如何选择适合自己的。
Week2|强化学习基础(硬件/评测/算法)
内容:强化学习介绍、常用机器人硬件及特点介绍、常用强化学习算法汇总、强化学习评测方法汇总; 学员产出:理解基础的强化学习算法数学原理,熟悉强化学习算法与训练的完整流程,手写最小的强化学习算法与训练代码。
Week3|仿真环境与平台
内容:Isaac Lab/MuJoCo等常用的机器人仿真训练框架介绍,基本的使用、训练、测试等; 实战方案:典型机器人训练任务讲解,包括四足机器人、机械臂、人形机器人等。 学员产出:完成一个机器人新任务的仿真训练。
Week4–5|sim2real + real2sim2real(1–2 个 idea)
内容:Sim2Real Gap的深度分析,解决gap的常用方法、典型思路。 学员交付:完成训练策略的sim2sim部署,理解sim2real/sim2sim的核心。
Week6–7|四足狗强化(1 个 idea)
内容:复杂地形鲁棒行走、外推冲击恢复、速度曲线跟踪;Teacher-Student/RMA等经典训练架构。 学员交付:复杂地形、外界干扰等条件下的行走 Demo + 消融图表等定量分析报告。
Week8–9|人形强化(1-2 个 idea)
内容:人形机器人训练pipeline详解(包括状态、动作、奖励等),模仿学习。 学员交付:实现强化学习训练行走与模仿学习训练行走两个完整demo + 定量分析报告。
Week10|机械臂强化 (1个idea)
内容:基础的pick&place训练,基于视觉等多模态信息的pick&place训练。 学员交付:训练一个典型操作任务+定量分析报告。
Week11|VLA + RL(1 个 idea)
内容:机械臂/人形的VLA灵巧操作,数据采集与VLA fine-tune,基于RL的VLA fine-tune。 学员交付:fine-tune一个VLA模型,在机器人上测试,完成分析报告。
Week12–13|写作指导(论文起草)
内容:论文写作工具分享(如overleaf等),问题 → 动机 → 方法 → 实验 → 消融 → 分析 → 结论。 图表:统一风格、baseline对比、消融实验对比、概念图等。 学员交付:论文初稿 v1.0(正文+补充+视频脚本)。
Week14|投稿打磨
目标:RAL/ICRA/IROS/CoRL等;清单:项目代码、模型/数据卡、视频。 交付:论文初稿与投稿路线图。
Week15-Week22 周|论文维护期
内容:补实验、改图、润色、投稿与审稿回复支持。
研究论文idea(部分示例)
四足:基于终身学习的四足机器人跨任务运动技能迁移研究 人形:神经科学启发下的人形机器人全身运动控制研究 机械臂/灵巧手:基于多模态感知信息的仿人灵巧操作研究 VLA+RL:基于长序列操作任务下的VLA自主学习研究
每个题目均配场景与基线;支持学员自拟题目,经导师评估后纳入里程碑
师资与服务
具身智能/RL/机器人控制背景的学研导师授课与课题把关。代码与实验日常答疑,论文润色与修改建议。
辅导老师介绍:Jack,来自美国顶尖高校的博士后研究员,专注于具身智能与机器人领域的突破性研究,拥有丰厚的理论沉淀与实战经验。曾在 RSS、ICRA、IROS、RAL 等全球顶级机器人会议期刊发表论文,并担任审稿人、客座编辑等。 老师擅长以通俗易懂的方式诠释深奥的概念,并通过翔实的案例和互动讨论,将复杂的具身智能技术转化为可以落地的实践方案。理论与实践并重,让学员既能掌握前沿知识,又能在动手过程中挖掘并强化自己的创新潜力。
基础与设备需求
必备:一定的Python编程和Linux基础;Nvidia GPU(建议12G以上)。无实机亦可完成仿真任务。 加分:Unitree/Franka/xArm/云深处/松灵机器人等设备优先参与实机环节。 如何报名参加? 开课时间:以报名页为准(滚动开班)。 时长:14 周核心训练 + 8周论文维护。 名额:每期 6 人,额满即止。 咨询:添加课程助理微信:AIDriver005。 选拔:需要简单面试哦(背景/选题意向/时间投入评估)。

FAQ环节
Q1:没有硬件能不能学?
可以。全套仿真与评测脚本即可完成;有硬件可申请加入真机小队。
Q2:一定能发论文吗?
提供论文idea、基线与写作/投稿辅导;录用取决于创新与实验质量。结营目标是具备投稿质量文章产出。
Q3:工作党时间不稳定怎么办?
提供课程回放,可以自由安排时间,但需要保证一定投入。
Q4:与普通训练营有何不同?
强调科研闭环:方法—工程—评测—写作—投稿—维护全流程陪跑,每周明确任务指标。