当人形机器人已能稳健行走、灵活跳跃,它们的下一站,或许是NBA赛场?
图中,斯坦福大学实验室的研究者正在教机器人如何“打篮球”。
不过,看似流畅的动作背后,藏着不少具身智能领域的挑战:
如何让智能体在长时间、连续、物理约束的任务中实现多技能的无缝衔接。
篮球不是单一动作的堆叠,运球需控节奏方向、合球要保平衡找衔接点、投篮得精准算轨迹时机,而最难的是动作间的 “过渡瞬间”——
重心切换、手部调整、出手节奏的把控。
人类靠经验完成,AI 过去靠强化学习几乎无法实现,这些 “模糊片段” 对机器而言,就像 NBA 季后赛关键球,成败只在几秒间……

核心内容
斯坦福大学的研究团队提出了一个名为 “Learning to Ball” 的框架,用一句话概括
——让机器人学会把多个独立的运动策略「串联」成一个完整的篮球动作。
论文提出的 “Policy Integration Framework”(策略集成框架)和 “Soft Routing Mechanism”(软路由机制),让虚拟角色可以像人类一样,在运球、集球、投篮等完全不同的技能之间自然切换,而不是机械地“切换脚本”。

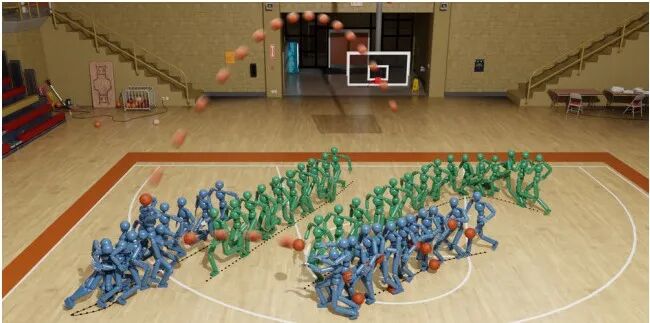
▲图1|在多阶段、长时程的任务中能够组合极其不同的运动技能,其中包括突破上篮、接球投篮以及抢进攻篮板并立即得分©️【深蓝具身智能】编译
研究将任务划分为三类:
直接执行(Direct Execution):前后动作状态相近,可以直接衔接。
相互适应(Mutual Adaptation):前后技能需互相调整状态才能过渡。
中间策略(Intermediate Policy):两技能差异太大,需要额外的“桥梁动作”,比如“gather”(集球)阶段。
关键思想:
① 用前一个策略的终止状态生成中间策略的初始分布;
② 再用后一个策略的价值函数(Value Function)来塑造奖励,引导中间策略学会“通往下一个阶段的动作”。
③ 最后,通过一个高层路由器动态地决定何时切换策略,实现流畅自然的长时序篮球动作。

接下来,我们就进入论文的核心——方法部分,看看研究者是如何一步步让机器人学会“打篮球”的。

分步策略
把篮球拆成“多阶段任务”
研究首先把篮球动作拆解成多个阶段性技能(Subtasks)。
例如一次“运球后投篮”的完整动作,被划分为三个阶段:
Dribble(运球):控制方向和节奏;
Gather(集球):停下、抓球、调整身体姿态;
Shoot(投篮):完成跳起与出手。

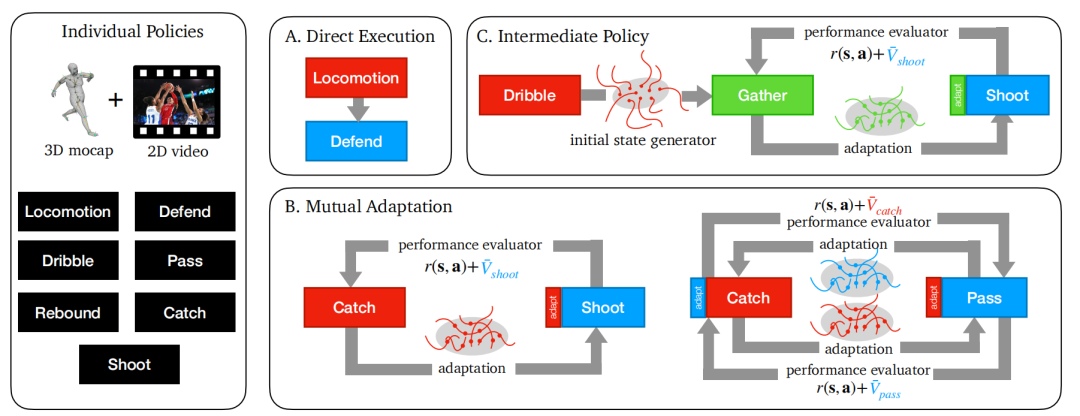
▲图2|图中展示了机器人掌握的七个篮球基础技能(运球、集球、投篮、传球、接球、篮板、防守),以及它们之间的衔接方式:A类是直接衔接、B类需要相互适配、C类则必须通过“中间动作”来连接,比如“集球”就是“运球→投篮”的桥梁。绿框代表这种额外学习的中间策略,让机器人的动作像真人一样连贯©️【深蓝具身智能】编译
这三个阶段的难点在于——它们之间没有清晰的边界。
运球结束的瞬间,可能姿势各异;而投篮开始前的姿态又必须严格规范。要让机器人在这两者之间“顺滑过渡”,就必须让中间的“集球”动作具备一定的适应性。
因此,研究提出了一种三类过渡模型(Transition Types):
A类:直接衔接(如“防守→移动”)
B类:相互适应(如“接球→投篮”,双方需调整)
C类:引入中间策略(如“运球→投篮”,必须经过集球阶段)
▲图3|三种过渡机制的对比:类型A可以直接切换;类型B要通过奖励函数和状态价值调整让策略互相兼容;而最难的类型C,需要单独训练一个“中间策略”——它利用上一个技能的终止状态作为起点,用下一个技能的价值函数来塑造奖励。这就是机器人能学会“从运球到投篮”自然衔接的关键©️【深蓝具身智能】编译
研究的重点,就是如何在C类过渡中训练出一个“会衔接”的中间策略,让整个长时序动作连续而自然。
用非结构化数据训练原始技能
传统强化学习方法往往依赖高质量、全身带球的动作捕捉数据,但这种数据昂贵又难收集。
本文研究的做法是“放宽条件”,让机器人从非结构化数据源中学习:
来自网络视频的动作片段(用TRAM提取身体姿态、ExAvatar提取手部姿态);
来自公开mocap数据集(如LAFAN1、CMU Mocap)的全身运动;
自行采集的手部动作数据(用智能手套捕捉运球与投篮手势)。
这意味着,数据之间不必对应——
机器人可以单独学到“手怎么运球”、“身体怎么跑”、“手指怎么发力”,再在强化学习中自己拼合出整体动作。
模型训练
训练采用 PPO + 对抗式模仿学习(Adversarial Imitation Learning):
通过判别器评估角色动作是否逼近人类;
用任务奖励引导机器人完成目标(如保持速度、保持球权、避免违规);
在物理仿真环境中(IsaacGym)持续探索,最终学会稳定的控球与运球动作。
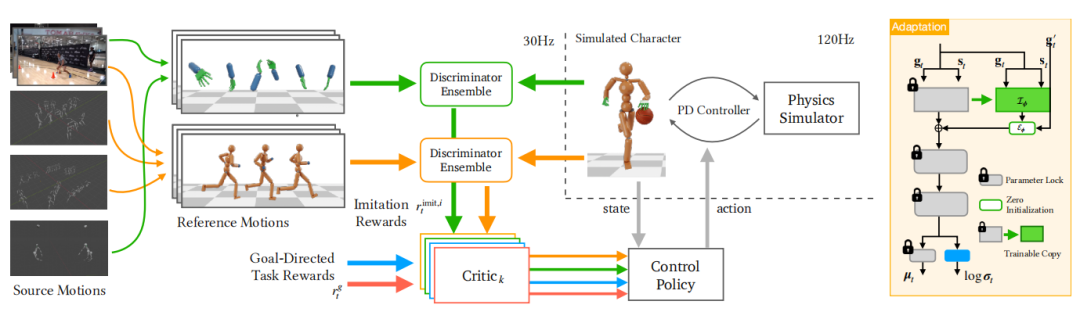
▲图4|机器人不是靠精准的动作捕捉训练,而是从杂乱的来源中学会动作——网络视频、无手的全身数据、仅有手部的短片段,甚至普通跑步数据。模型把这些碎片拼成整体,通过模仿与强化学习结合,在物理仿真中一点点学会“像人那样打篮球”©️【深蓝具身智能】编译
简单来说,就是让机器人“看别人打球”,然后在模拟世界里一遍遍试,直到能流畅模仿。
中间策略的奖励塑形
最核心的一步来了
——如何训练出那个“集球(Gather)”策略,让机器人从运球自然地切换到投篮?
研究提出一种巧妙的双向引导训练法:
前向引导(Initial States):用“运球”策略生成的状态作为“集球”策略的起点;
后向引导(Value Shaping):用“投篮”策略的价值函数作为“集球”策略的奖励。
这意味着,“集球”策略会被奖励去做那些能提升投篮成功率的姿态,而不是盲目地模仿参考动作。
最终的奖励函数可理解为:“如果角色的姿态能让后续投篮成功的几率变高,就给高分。”

▲图5|这张图展示了AI在不同阶段与篮球的交互过程。从左到右依次是:运球、集球、投篮。可以看到,AI角色的手部动作已不再僵硬,而是能灵活地控制、抓握、发力©️【深蓝具身智能】编译
与此同时,投篮策略也在同步微调——它会逐渐适应由“集球”阶段生成的输入状态,从而实现真正的连贯控制。
这种双向适配(Mutual Adaptation)让不同阶段的策略可以共同进化,像两名熟练的队友那样配合默契。
谁在控球、谁该出手
当每个阶段的策略都学会了之后,还需要一个“教练”来调度它们。
研究设计了一个 高层软路由器(High-Level Soft Router),它的作用就是在每一帧动态决定:“现在该运球?该集球?还是该投篮?”
与传统的硬切换不同,软路由器并不会一次只启用一个策略,而是根据当前状态、目标命令(如玩家输入的“shoot”)、以及各策略的输出动作,进行加权融合。

▲图6|这张图展示了论文中的高层软路由机制。它像一位“虚拟教练”,实时决定角色下一步要执行哪种动作。路由器会综合用户指令、当前状态和目标向量,为各个子策略分配权重,并将它们的输出动作线性融合©️【深蓝具身智能】编译
这种“软切换”带来两个好处:
动作自然:避免因突变导致姿态跳跃或失衡;
响应灵活:能随时根据用户指令平滑过渡,比如“边跑边投”。
训练时,研究者还通过一个特殊的奖励机制鼓励“主导性”——
每次只有一个子策略占主导(权重最大),从而在自然过渡与清晰分工之间取得平衡。
最终,这个软路由系统让机器人在真实物理模拟中完成了令人惊艳的表演:它可以在任意方向运球、转身、集球、起跳、投篮,投篮命中率高达 91.8%,且能完成双人传球、对抗防守等多智能体协作。

实验结果
在大量物理仿真实验中,这一框架的表现堪称惊艳。研究团队让机器人在IsaacGym环境中学习并执行一系列完整的篮球动作序列,包括“运球—急停—集球—投篮”、“接球—转身—出手”、“抢篮板—补篮”等长时序操作。

▲图7|这张图展示了用于统计投篮命中率的测试环境。研究者在虚拟篮球场上设置了多个投篮位置和角度,AI角色会从不同方向、不同速度发起进攻,系统自动记录每次出手的成功率。正是在这样的高标准测试下,AI依然保持了超过 91% 的命中率©️【深蓝具身智能】编译
实验表明,经过训练的智能体能够在完全无参考球轨迹的条件下,依然实现流畅的动作衔接和高质量控制。
尤其是在最具挑战的“运球后投篮”任务中,模型在不同速度、角度、甚至背对篮筐的状态下,都能完成平滑过渡并保持平衡,投篮命中率高达 91.8%,与仅在固定状态训练的投篮策略(93.0%)几乎持平。
▲图8|这张图展示了一个由四个角色组成的实时 2v2 篮球比赛,AI负责处理运动控制和动作衔接,让角色能像真实球员一样运球、传球、转身、防守、出手©️【深蓝具身智能】编译
与此同时,机器人的接球成功率达98.3% ,展现出对复杂状态切换的强大稳定性。
相比之下,几种对比方法——
直接拼接策略(Direct Execution)、顺序训练(Sequential Ch机器人ning)以及无适配策略(NoAdapt)
在动态状态下均出现卡顿或断裂,成功率不足10%。

▲图9|这张柱状图展示了不同方法在各种运球速度下的接球成功率。传统的直接切换策略(Direct Execution)几乎完全失败,因为各子策略之间状态不兼容;未进行适配的 NoAdapt 方法虽然集球动作稳定(红柱高),但投篮阶段失效(蓝柱骤降);顺序训练(Sequential Chaining)略有改善,却仍无法在高速运球中保持稳定衔接。而论文提出的策略集成框架在所有速度下都保持接球成功率接近 100%,展现出极高的动作连贯性与鲁棒性©️【深蓝具身智能】编译
而引入高层软路由后,机器人在多阶段动作切换时几乎消除了迟滞问题,整体命中率提升超过30个百分点。
视觉效果上,机器人的动作自然衔接——
能在高速运球中急停、抓球、转身、起跳、出手,全程平滑连贯。
进一步的多智能体实验中,多个机器人球员可完成传球、接球、防守等团队配合,甚至在2v2比赛中展现出策略性的攻防节奏。

▲图10|这张图展示了两个AI球员之间的协同动作。一个负责运球传球(passing-off-the-dribble),另一个完成接球投篮(shooting-off-the-catching)。两者的配合并非脚本预设,而是通过论文提出的策略适配与组合框架自动学得©️【深蓝具身智能】编译
总体而言,这一系统不仅在量化指标上取得显著提升,更重要的是,它让强化学习的角色控制摆脱了“短命动作”的桎梏,真正实现了长时序、多阶段、自然衔接的人体动作生成。

总结
如果说强化学习过去只会教AI“走路”“跑步”,那么这篇论文让它第一次真正学会了“打篮球”。
在斯坦福的虚拟球场上,AI 不再是呆板的代码模型,而是能像球员一样读节奏、找时机、判断出手点。
它可以在高速突破中急停、集球、转身、后仰、投篮,命中率高达 91.8%;还能和队友完成流畅的传切配合,甚至懂得在篮下卡位、补篮、起跳得分。
要不是背景是一片数字化的虚拟球场,你可能真会误以为自己在看一场 NBA 慢动作回放。
这或许意味着,未来的篮球比赛不一定只发生在球馆里——它可能出现在虚拟现实、游戏世界,甚至机器人竞技场。
编辑|阿豹
审编|具身君
Ref
论文标题:Learning to Ball: Composing Policies for Long-Horizon Basketball Moves
论文作者:Pei Xu, Zhen Wu, Ruocheng Wang, Vishnu Sarukkai, Kayvon Fatahalian, Ioannis Karamouzas, Victor Zordan, C. Karen Liu
论文链接:https://arxiv.org/pdf/2509.22442
工作投稿|商务合作|转载
:SL13126828869(微信号)


【具身宝典】||||
【技术深度】|||||||
【先锋观点】|||
【非开源代码复现】||
我们开设此账号,想要向各位对【具身智能】感兴趣的人传递最前沿最权威的知识讯息外,也想和大家一起见证它到底是泡沫还是又一场热浪?
欢迎关注【深蓝具身智能】👇

【深蓝具身智能】的内容均由作者团队倾注个人心血制作而成,希望各位遵守原创规则珍惜作者们的劳动成果。
投稿|商务合作|转载:SL13126828869(微信)

点击❤收藏并推荐本文