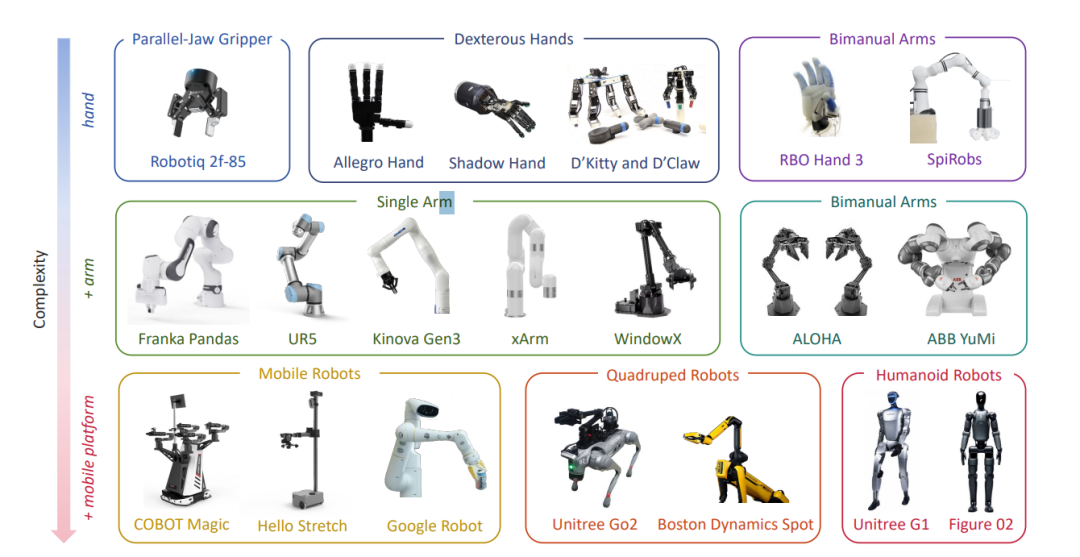
在介绍操作任务与算法之前,先把“身体”说清楚:一套操作系统通常由机械手(Hand)、机械臂(Arm)与移动平台(Mobile Base)三部分构成。不同组合定义了具身构型与可达能力、可操作性与安全性。下文按单臂→双臂→灵巧手→软体手→移动操作平台→四足→人形的结构,对常见研究平台逐一给出背景、特性、应用与注意事项,便于选型与后续方法落地。
选型速览:你该优先关注什么?
任务空间:可达范围、关节型式(串联/并联/腰部)、奇异位姿回避与自碰撞空间。
负载与动态性能:末端负载、关节峰值速度/加速度、关节回差与刚度。
顺应与安全:力/扭矩感知、阻抗/导纳控制、碰撞检测、协作等级(cobot)。
感知与接口:腕/指端传感、相机位置、时钟同步、实时通信(EtherCAT/ROS2)。
生态与成本:开源示例、社区规模、备件/维保、二次开发资料完备度。
1.单臂机器人(Single Arm)
KUKA LBR iiwa
定位:早期标志性的协作型7-DoF轻量臂,内置关节力/扭矩感知。
特性:顺应控制成熟,适合人机协作、插入/装配类精细任务。
应用:力控示教、抛光/插入、HRI研究。
要点:商业接口完备;注意工控链路、许可与维护成本。
Franka Emika Panda
定位:学术/工业两端广泛使用的7-DoF轻量臂。
特性:高性价比、扭矩感知与阻抗控制好用;社区与示例丰富。
应用:抓放、插拔、视觉伺服、模仿学习/强化学习基准。
要点:末端换装方便;需关注控制频率与安全参数配置。
UR5 / UR10(Universal Robots)
定位:工业级协作臂,6-DoF,稳定可靠。
特性:生态成熟、第三方末端与软件支持丰富;负载/臂展多档。
应用:搬运码垛、拧紧/装配、检测、教育培训。
要点:默认阻抗能力有限,复杂力控需额外方案;集成成本低。
Kinova Gen3
定位:轻量级7-DoF臂,科研友好。
特性:紧凑、易携带,API与文档完备;配套2F-85/2F-140夹爪常见。
应用:移动平台上搭载、服务机器人、教育科研。
要点:负载偏小,注意工具中心点与轨迹平滑。
xArm6 / xArm7(UFactory)
定位:性价比导向的6/7-DoF协作臂。
特性:入门门槛低,硬件与控制接口简单;开源示例较多。
应用:抓放/分拣、简单装配、VLA/IL/RL快速验证。
要点:高动态/高精度力控需评估;注意自碰撞与奇异位姿。
2.双臂机器人(Bimanual Arms)
Franka Panda Dual Arm
定位:两台Panda组合的双臂系统。
特性:双手协作、物体接力、工具辅助操作;社区案例丰富。
应用:双手装配、折叠/翻转、复杂夹取与操作顺序学习。
要点:跨臂碰撞与约束规划、时序协调与通讯同步是关键。
ALOHA 系统
定位:低成本开源式双臂遥操作/数据采集平台与数据集路线。
特性:强调人示教→数据驱动学习的端到端策略训练。
应用:灵巧操作数据采集、模仿学习、VLA小样本学习。
要点:硬件拼装/标定规范需严格;时延与双臂配合需调优。
ABB YuMi
定位:商用双臂协作机器人,内置视觉与安全设计。
特性:高集成、节拍稳定,适合电子装配等精细作业。
应用:小件装配、分拣与上料、HRC。
要点:工业生态完备;研究灵活性需结合官方接口评估。
3.灵巧手(Dexterous Hands)
注:用户清单中“Robotiq Dexterous Gripper”更常指 Robotiq 2F 系列两指夹爪,并非严格意义上的“灵巧手”。下列条目按研究使用习惯给出。 |
Robotiq 2F 系列(2F‑85 / 2F‑140 / Hand‑E)
定位:通用两指夹爪,夹宽范围大,部署便捷。
特性:稳健耐用,接口成熟;非多指灵巧,胜在可靠。
应用:抓取与放置、码垛、上料、教育与工业入门。
要点:对不规则/软物体的稳固操控需配合指套/自适应夹指。
Allegro Hand
定位:四指16‑DoF研究型灵巧手,性价比较高。
特性:可做指间滚动、捏取、旋转;软硬件社区活跃。
应用:灵巧操作、模仿学习、策略迁移研究。
要点:标定与力触觉接入很关键;练好保护与限位策略。
Shadow Hand
定位:高度仿人形五指手,多自由度与传感配置丰富。
特性:动作空间大、可装力/触传感;工程复杂度与成本较高。
应用:高难灵巧操作、RL/IL基准、远程演示。
要点:维护与调参成本高;策略训练需更强仿真对齐。
D’Claw / D’Kitty(研究基准平台)
定位:开源/低成本研究平台,常用于RL与操作基准。
特性:D’Claw 多指/旋钮任务基准;D’Kitty 多用于移动/灵活性研究。
应用:快速算法验证、对比基准与课程教学。
要点:与工业应用有差距,但非常适合算法迭代。
4.软体手(Soft Hands)
RBO Hand 3
定位:TU Berlin 推出的软体手,气动驱动、柔顺贴合。
特性:适应形状与材质多样物体,安全性好。
应用:易碎/不规则物体抓取、HRI、安全接触研究。
要点:控制与建模不同于硬结构;对气动系统响应有要求。
Festo BionicSoftHand
定位:仿生腱驱/气动结合的概念型软体手。
特性:顺应性强、演示效果佳;多用于概念验证与展演。
应用:教育展示、软体控制方法研究。
要点:商品化与标准化接口需评估;工程化资料有限。
SpiRobs(软体抓手方向)
定位:软体抓手/气动网络类研究与原型方向的代表。
特性:依靠材料与结构实现自适应包络抓取。
应用:食品/轻工分拣、形变物体抓取。
要点:力度/形变可控性与寿命评估是落地关键。
5.移动机器人(Mobile Manipulators)
Hello Robot Stretch 3
定位:轻量移动底盘 + 伸缩臂 + 升降立柱,HRI友好。
特性:覆盖家居高频任务(拉门、取物、按键);API友好。
应用:家庭/照护场景、人机交互、服务机器人研究。
要点:负载与动态性能有限,重任务需谨慎评估。
PR2
定位:经典研究平台(已停产),双臂+移动底盘。
特性:历史生态庞大,奠定大量感知与操作研究基线。
应用:多传感融合、移动操作、全栈系统研究。
要点:设备老化、维保成本高;更多用于历史成果复现。
PAL Robotics TIAGo
定位:商用移动操作平台,单臂+升降+移动底盘。
特性:与室内导航/人机交互结合,配套软件链完整。
应用:室内服务、研究教学、轻量操作。
要点:负载与臂展取舍明显;需精细化场景流程设计。
6.四足机器人(Quadruped Robots)
Unitree GO2 / B1 / Aliengo
定位:高机动四足平台,支持装配轻量机械臂,形成移动操作。
特性:越障能力强、外场适应性好;官方SDK与仿真接口齐全。
应用:巡检与探测、室外取放、视觉/导航/操作融合研究。
要点:上臂后重心/供电/通讯管理要到位;安全缓冲与急停必备。
Boston Dynamics Spot
定位:工程化程度高的四足平台,可集成相机/机械臂。
特性:可靠性与环境适应力强;生态配件丰富。
应用:工业巡检、设施维护、场站巡逻与取样。
要点:成本较高,臂的负载/速度与控制接口需要评估。
7.人形机器人(Humanoid Robots)
Tesla Optimus Gen 2(“擎天柱”)
定位:面向通用服务的双足人形平台路线。
特性:强调端到端AI与数据驱动迭代,瞄准家居/工厂复用。
应用:抓取/搬运、简单装配、日常交互的长期目标。
要点:仍在快速演化中;真实世界的稳健性与安全是核心挑战。
Boston Dynamics Atlas(新一代全电)
定位:高运动能力的人形平台,展示复杂运动与操作潜力。
特性:动态平衡与全身协调突出,研究示范属性强。
应用:复杂地形、搬运与工具使用演示、算法验证。
要点:工程化与通用应用仍在探索;研究展示价值更大。
Figure 02
定位:面向通用劳动力的人形机器人路线。
特性:强调以视觉-语言-动作模型与数据飞轮驱动能力增长。
应用:物流搬运、流水线作业、基础家务等目标场景。
要点:生态与量产节奏仍在推进;评估真实场景稳定性。
1X NEO(“NEO”)
定位:1X Technologies 推出的人形平台,聚焦安全与商用落地。
特性:强调远程操作与逐步自治结合的路线。
应用:安保/巡检、简单搬运与服务。
要点:人机协作安全与法规合规要求高。
Unitree G1
定位:轻量化人形平台,成本与易用性导向。
特性:整机紧凑,结合自家运动控制经验;适合教育/研究与轻任务。
应用:步行/抓取入门、VLA/RL方法验证。
要点:末端执行器/手部形态多样性与负载需按任务定配。
附:末端执行器与传感搭配建议
基础抓取:并联两指(Robotiq 2F、Hand‑E)+ 指套/定制指面;配合吸盘做混合抓取。
灵巧操作:Allegro/Shadow + 指端力/触 + 腕力矩;必配高帧率相机/光源。
软物体:软体抓手 + 压力/流量控制;视觉-力耦合的释放判据。
移动操作:臂端相机(IBVS/手眼)、激光/深度相机、稳固的时间同步与TF树。
选型清单(Checklists)
几何与运动学:臂展/自由度/关节极限/奇异位姿/自碰撞检查。
动力与安全:负载曲线/关节最大速度/阻抗参数/急停/限力/限速。
感知与时序:相机/力传/触觉/时钟同步/数据带宽/日志流水线。
接口与生态:驱动/SDK/实时总线/ROS(1/2)/社区案例/备件与维保。
成本与风险:采购/运营/维护成本;培训与安全SOP,责任边界与保险。
小结
单臂/双臂决定“手的能力边界”,移动/四足/人形决定“脚能去多远”。
灵巧手/软体手把“可抓取的物体集合”从规则刚体扩展到脆弱/柔软/不规则。
真正落地来自工况约束+感知闭环+安全策略+数据飞轮的整体设计,而非某一块硬件单点拉满。
依据场景从“可控小闭环”出发,逐步扩充到“移动-抓取-操作”的系统闭环,是当下最稳妥的路径。