在实现形变、行走、抓取等核心功能时,传统软体机器人往往依赖连续驱动与复杂控制系统,这使得其在能效与灵活性之间难以实现有效平衡。自然界中的多稳态结构例如捕蝇草的快速闭合机制、折纸结构的多形态转换特性,为设计高适应性机器人提供了关键灵感:这类结构可在不同稳定形态间快速切换,展现出极强的环境适应能力。
然而,当前多数人工多稳态结构仍受限于可重构性不足的问题,通常仅能在两至三种预设形态间实现转换。若需实现更丰富的形态变化,往往需将多个单元组合,而这不可避免地增加了设计与驱动的复杂性,进而限制了其在复杂场景中的实际应用。
据探索前沿科技边界,传递前沿科技成果的X-robot投稿。为应对上述挑战,美国北卡罗来纳州立大学的研究团队近日提出一种基于可展曲面的多稳态薄壳元结构。该结构可在无需外部锁定力的条件下,自由切换多种稳定形态。相关研究成果以“Multistable thin-shell metastructures for multiresponsive reconfigurable metabots”为题,在线发表于国际权威期刊《Science Advances》上。
▍高形变效率的多稳态薄壳元结构
这项技术的核心构思融合了折纸艺术的灵感,并在实现方式上展现出更高程度的智能化。研究团队以方形PET薄膜为起点,通过在其内部切割H形缺口,并将缺口两侧内缘粘合,自发形成一个具有对称三维曲率的薄壳结构。该结构在成型过程中储存了弹性应变能,从而赋予其多稳态特性,使其能够稳定存在于多种不同的三维形态中。
进一步研究表明,随着粘合距离的增加,结构单元能够呈现的稳态数量显著上升,从最初的4种跃升至20种。有限元分析结果指出,这一变化伴随着结构内部弹性能量从0.41mJ提升至6.54mJ。更高的能量储备激活了更多潜在的稳定构型,使结构具备丰富的形态选择能力。

高变形效率多稳态壳元结构及其多功能机器人应用
与传统的双稳态结构相比,它在一个简单、紧凑的单元内实现了更高的变形效率,约为五稳态四顶点折纸积木的四倍。而当这些单元像拼图一样连接成网络时,其可重构的形态数量更是呈指数级增长。例如,一个由四个单元组成的网络,理论上可以产生高达256种不同的稳定配置。这种强大的组合能力,为构建高度复杂的可重构系统奠定了坚实基础。
那么,一个结构是如何实现复杂形态切换的?研究人员以一个键合距离为30毫米的单元为例,揭示了其工作原理。该单元具有16种对称的稳定构型。所有这些形态变换,都通过推拉结构上四个特定的触发区域实现——它们位于两端弧顶和中间连接带两侧。这些区域对应着结构内部应力和弯曲能量的集中处,对其施加微小扰动即可重新分配内部储存的弹性势能,引导结构在不同稳定状态间转换。
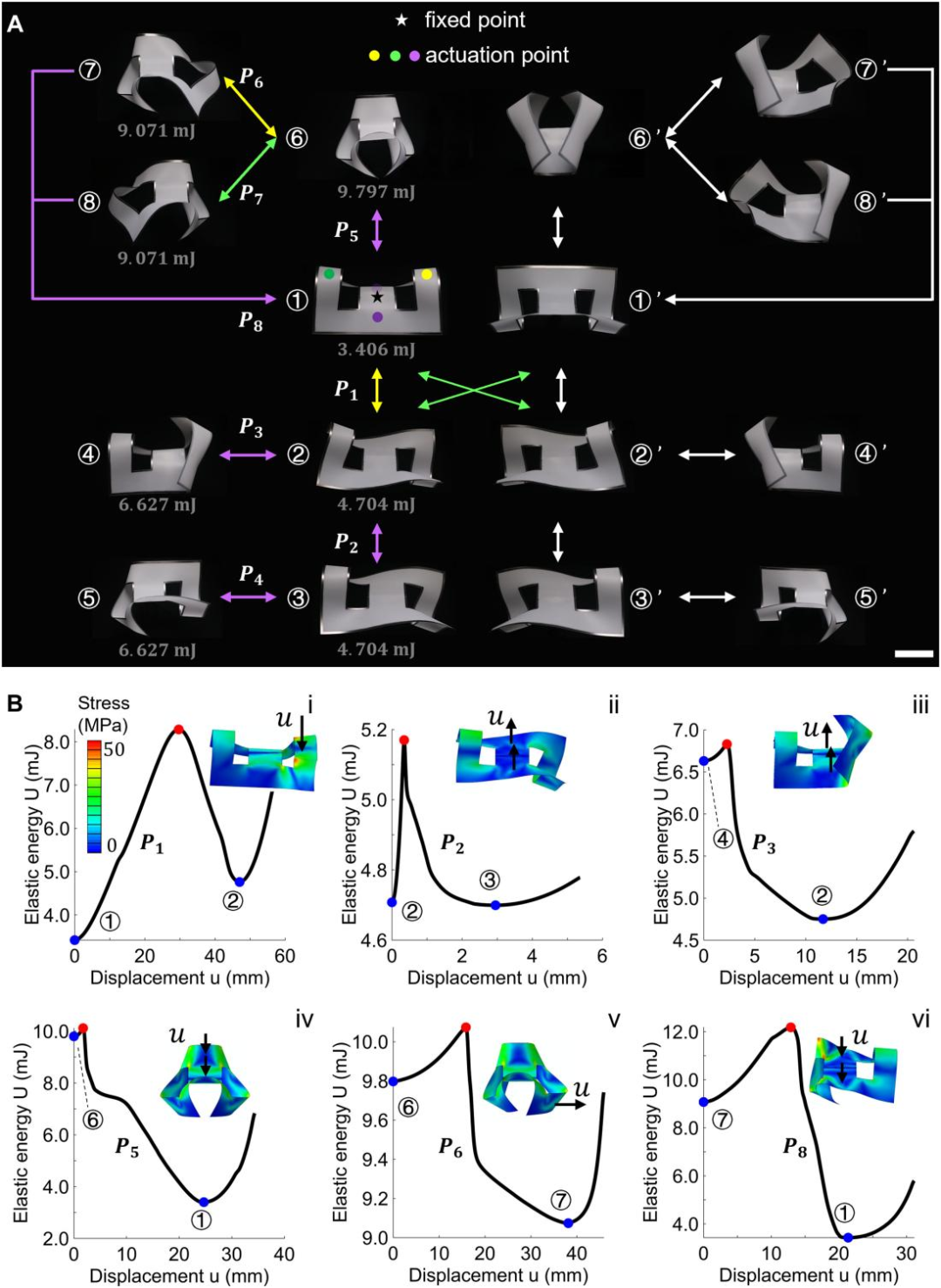
多稳态单元格中的形状转变和能量景观
这个过程伴随着可量化的能量变化。有限元模拟显示了每次形态转变的能量曲线。当结构变形时,其弹性应变能会先上升至一个峰值(不稳定状态),然后下降至一个新的局部极小值(稳定状态)。这种“峰值-双谷值”的能量特征证实了系统的多稳态特性。例如,从构型①(3.4mJ)向构型⑧(9.1mJ)转变需要克服显著的能量壁垒,其中最高的能垒达8.6mJ。而在某些能量相近的状态间转换,仅需克服0.2-0.3mJ的微小能垒,这使得部分状态转换尤为容易。
更重要的是,结构的稳定状态数量可以通过制造参数精确调控。粘合距离(d)是关键设计变量:距离越大,预存的弹性能量越高,能够维持的稳定形态就越多;减小粘合距离则降低预存能量,导致部分高能量稳定态消失。这为按需设计元结构提供了明确的理论依据。
▍“动态虚拟折痕”:解锁复杂变形的理论钥匙
为了理解多稳态壳元结构中的变形机制,在深入研究之后,团队创新新地提出了“动态虚拟折痕”的概念。
类比传统折纸的物理痕迹,一条条实实在在的折痕决定了纸张在哪里弯曲。而在这类光滑的薄壳结构中,虽然表面没有实际的折痕,但在内部能量分布的驱动下,会形成一些“看不见的折痕”。这些折痕是弯曲能量最高的区域,它们如同隐藏的指令线,主导着结构的变形行为。

通过可展开薄壳晶胞中动态虚拟折痕的局部折叠进行形状变换
通过FEA和离散可展曲面理论,研究团队能够精准地定位这些“虚拟折痕”。他们发现,结构的形态切换,本质上就是通过有选择地“折叠”这些不同的虚拟折痕组来实现的。例如,折叠壳体两端水平方向的虚拟折痕,可能使结构从一个穹顶状变为一个马鞍状;而折叠中心区域倾斜的虚拟折痕,则可能引发整体的扭转。
更关键的是,这些虚拟折痕并非一成不变,它们会随着结构的变形而动态出现、消失或改变方向,从而引导出丰富多样的变形路径。这一概念的提出,不仅完美地解释了实验观察到的现象,更为主动设计和编程这类结构的变形行为提供了强大的理论工具。
▍多稳态元结构的应用拓展:功能化可重构机器人
多稳态元结构本身已足够巧妙,但它的真正魅力在于与现代驱动技术结合后,所催生出的各种功能强大的可重构机器人。这些机器人展现了前所未有的适应性和多功能性。
非侵入式双稳态夹持器
非侵入式双稳态夹持器基于双稳态结构实现高效抓取。该夹持器具有“张开”与“闭合”两种稳定状态,通过滑块机构实现快速切换。在抓取过程中,它通过环抱而非挤压的方式包裹物体,适用于豆腐等易碎物品,且能适应球形、锥形、不规则形状及颗粒材料等多种对象。由于双稳态结构在抓取与释放状态均无需能量维持,仅在切换时需少量输入,因此具备显著的节能特性,有望成为一种通用且安全的抓取方案。

通用非侵入式双稳态夹持器中的应用
磁性多步态机器人
进一步地,研究团队还开发了磁性多步态机器人,通过在多稳态单元关键部位集成磁响应软材料条带,实现磁场远程控制。仅通过旋转外部磁场方向,机器人即可在多达十二种形态间切换,并在撤去磁场后维持形态,降低能耗。该机器人具备多种运动模式:在卷曲形态下可储存弹性能并实现跳跃移动;在低矮形态下可通过磁致振动进行爬行。其出色的环境适应性使其能在崎岖地形中切换运动模式以跨越障碍,或在低矮通道中调整形态穿行,在灾害救援与管道检测等复杂场景中具有应用潜力。

通过形状变换应用于自适应磁性多步态跳跃器和爬行器
双响应机动爬行机器人
双响应机动爬行机器人集成了磁驱动与电驱动,具备更精细的运动控制能力。该机器人由两个多稳态单元构成,磁驱动负责整体形状变化,压电聚合物薄膜则在通电后产生高频振动作为驱动源。通过磁场调整身体形态,可改变机器人与地面的接触方式,从而实现不同运动模式,如旋转、直线移动或转向。在模拟T形迷宫实验中,该机器人通过形态切换与运动协调实现了自主导航,展示了在微创手术与设备检修等狭窄空间中的应用潜力。

双响应可重构机动爬行器在有限空间中的应用
▍关于X-robot
X-robot是中关村机器人产业创新中心与机器人大讲堂联手打造的权威性信息发布品牌专栏,集前沿探索、产业研究、知识普及于一体,致力于积极推动新质生产力的生成与发展,助力我国乃至全球机器人行业的蓬勃繁荣。X-robot立足国际化视野,通过全方位、多角度的挖掘与追踪,生动展现机器人前沿技术与尖端成果,为学术界、产业界及公众提供一个洞见未来、共享科技的重要窗口。
论文链接:https://www.science.org/doi/10.1126/sciadv.adx4359