点击蓝字
关注要点纵航 Subscribe for More

重要会议:
社群邀请:欢迎加入要点纵航低空飞行器交流群,可添加工作人员微信:18958230600!
随着城市空中交通(UAM)领域的快速发展,电动垂直起降飞行器(eVTOL)对推进系统的功率密度、热管理能力与结构可靠性提出了严苛要求。本文基于Archer Aviation相关专利公布的电动推进系统方案,围绕逆变器堆叠设计、轴向紧凑架构与转子牺牲层平衡技术展开深度解析,揭示多技术协同对飞行器整体性能的提升机制。

逆变器设计的革新:
多层堆叠与柔性蛇形连接
在eVTOL飞行器设计中,空间与重量管控具有核心优先级,每一处空间、每一分重量都直接决定飞行器的最终性能。逆变器作为直流电转交流电的核心电能变换部件,其物理布局与集成方式直接决定系统的能量转换效率。
1.1
多层PCBA堆叠架构
该方案设计的高集成度逆变器组件,核心创新在于印刷电路板组件(PCBA)的垂直堆叠架构。如图23所示,逆变器组件(2300)采用多层级结构设计,包含功率PCBA(2310)、控制PCBA(2314)与栅极驱动PCBA(2316)等核心功能板。

图23 垂直起降(VTOL)飞行器逆变器组件的分解视图
该堆叠方案不仅大幅压缩了逆变器径向尺寸,使其外径与电动机外壳精准匹配,形成紧凑的圆柱形截面构型,还通过大幅缩短功率回路导线长度,降低了电磁干扰(EMI)与线路寄生损耗。为保障多层堆叠板的精准对位,系统设置多组定位销(如2326),定位销穿过电容器外壳与各层PCBA的定位通孔,将整个堆叠组件精准锁定在设计位置。
1.2
柔性电路板的蛇形连接
针对空间受限、构型复杂工况下的高可靠电气连接需求,方案采用了蛇形连接(Snaking Connection)设计。如图58所示,柔性电路板(5802)设置了特殊蛇形结构(5806),该结构通过对层压电路板的精密切割成型。

图58 柔性印刷电路板组件(PCBA)连接透视图
该蛇形连接设计的核心优势体现在两方面:
一是优异的柔性变形能力。蛇形结构允许连接点在特定方向(如垂直于PCBA平面的方向)产生可控偏转与挠曲;图59进一步展示了该结构的横截面,其中设置的局部切口(5902)形成物理层面的“非连续性”,大幅提升了电路板的柔韧性能。

图59 图58所示柔性印刷电路板组件(PCBA)的蛇形连接剖视图
二是可实现公差补偿与振动应力缓释。航空推进系统的高振动服役环境中,刚性电气连接易产生疲劳裂纹,引发连接失效。而蛇形连接具备可控的弹性变形能力,其挠曲因子可低至0.015以下,能有效吸收装配过程中的尺寸公差,同时缓释运行中的结构振动应力,显著提升系统长期服役可靠性。

机械架构:
轴向对齐的紧凑型集成设计
方案的另一核心突破,是推进单元的一体化机械集成设计,即逆变器、变速箱与电机沿同一中心轴对齐布置的串联式架构。
2.1
共中心轴设计的核心优势
如图7与图9所示,电动机组件(702)、变速箱组件(710)与逆变器组件(718)采用共轴排布设计,图13的分解视图清晰展示了主轴组件(1308)沿中心轴贯穿整个推进单元的构型。该共轴设计的核心优势集中于两点:

图7 垂直起降(VTOL)飞行器倾转式电推进系统示意图

图9 垂直起降(VTOL)飞行器升力式电推进系统示意图
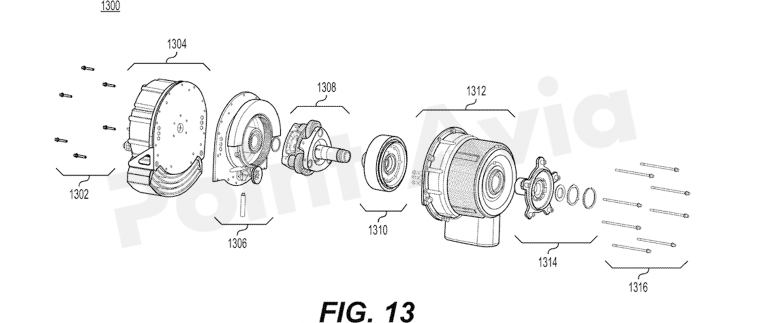
图13 垂直起降(VTOL)飞行器电推进系统的分解视图
第一,气动性能的优化。共轴排布使整个推进单元形成细长的圆柱形轮廓,如图7所示,推进系统产生的气流(722)可顺滑流经组件外表面,大幅降低飞行过程中的气动阻力
第二,为集成化冷却流道设计提供了构型基础。该串联架构可使冷却液或润滑油在单元内部形成连续循环回路,图12A与图12B详细展示了工作流体从电动机侧流向逆变器热交换器、再回流至泵体的完整循环路径。


图12A-12B 垂直起降(VTOL)飞行器电推进系统视图及框图
2.2
空间优化与制造装配便利性
方案将逆变器直接集成安装在电机后端盖位置,取消了传统方案中笨重的外部功率电缆连接。如图11A至图11C所示,逆变器组件与电机、变速箱紧密对接,可共用散热结构与支撑部件。这种高度集成的“三合一”动力单元,不仅有效降低了飞行器重心、提升了飞行稳定性,还大幅简化了推进单元在机翼纵向梁(Booms)上的安装工序。

图11A–11C 垂直起降(VTOL)飞行器电推进系统的多幅剖视图

转子平衡技术:
基于牺牲层的精密平衡方案
eVTOL推进电机长期处于高转速运行工况,转子的微小质量不平衡都会引发剧烈振动与噪声,甚至威胁结构安全与服役寿命。针对这一痛点,方案提出了基于牺牲层的转子精密质量平衡方法。
3.1
牺牲层的结构设计
如图50所示,转子(5000)制造过程中,会在其内圆或外圆表面预制一层或多层牺牲层(5004、5012)。牺牲层通常采用铝、钢或其他易机加工材料制备,与转子本体采用一体化成型工艺加工。

图50 垂直起降(VTOL)飞行器转子透视图
3.2
精密平衡的工艺流程
传统转子平衡工艺多采用添加配重块(如铆钉配重)的方式,配重块在电机高转速工况下存在脱落风险,给飞行器带来安全隐患。本方案采用的去重式平衡工艺(如图51与图52所示),核心流程如下:

图51 垂直起降(VTOL)飞行器转子平衡流程图

图52 垂直起降(VTOL)飞行器转子平衡流程图
第一步,不平衡量识别与检测。标定转子旋转轴心,在转子旋转过程中,精准检测其质量分布产生的不平衡量与不平衡相位。
第二步,去质量计算与精密切削。根据不平衡量检测结果,精准计算需移除的材料质量与对应位置,通过高精度数控机床(CNC)在牺牲层对应位置切削去除多余材料(即移除质量r)。
第三步,亚微米级平衡精度控制。该方法可实现极高的平衡精度,通过牺牲层材料的精准去除,可将转子不平衡量控制在5微米甚至更高的分辨率范围内,保障转子在全工作转速区间内的振动水平降至最低。
3.3
全生命周期的维护适配性
牺牲层设计同时具备全生命周期维护适配性。若转子长期服役后因磨损、疲劳等因素产生新的不平衡量,技术人员可通过对牺牲层的二次切削完成平衡精度修复,无需更换整套昂贵的转子组件,大幅降低了推进系统的全生命周期维护成本。
如需本文原文
请联系要点纵航工作人员领取!

要点纵航工作人员微信

来源:公开信息,要点纵航整理
提示:原创文章未经允许,请勿转载
免责申明:本文中所含内容乃一般性信息,包含的价格及观点仅供贵方参考,要点纵航不对任何方因使用本文内容而导致的任何损失承担责任。


要点纵航专注于低空经济和eVTOL技术的发展,识别并研究行业的关键障碍及相关需求。我们通过提供数据、分析和见解,与行业参与者共同致力于实现安全、可持续、低成本且可及的变革性城市空中出行方式。一公里的地面交通只能带您走一公里,而一公里的空中飞行可以带您到任何地方!
如您想获取更多关于eVTOL技术的最新消息,请添加相关人员或通过电子邮件,把您的要求发送给我们。

18958230600

alfred.shen@cycolpower.com

你们点点“分享”,给我充点儿电吧~