文|编辑部
先是马斯克放话:未来80%的特斯拉市值将来自人形机器人业务,一下把大家的注意力从电动车又拉回到了那台神秘的Optimus上。
紧接着,一段新视频又在网络上疯传。
视频最早是由Salesforce CEO Marc Benioff 发布的,主角自然是 Optimus。但这次,它换了个“金闪闪”的新壳,手部结构也更精细。除了外观吸睛,这台机器人的售价也不便宜, Benioff 亲口透露:20万到50万美元之间。

最让人眼前一亮的,还是它的“走路方式”。视频里,这台金色 Optimus 的步态明显更加自然,脚跟着地、步伐稳健,非常接近人类走路的方式。
但这个步态,看起来非常熟悉。
几乎就是前不久,国产机器人公司开普勒发布的K2“大黄蜂”抗扰动步态视频中的“同款步态”。视频中,K2“大黄蜂”在砖石、塑胶、草地等复杂环境和外力干扰中依然保持直膝步态、稳定行走,展现了强大的平衡能力与环境适应性。
为什么看起来这么像?追根溯源后得知,原来特斯拉和开普勒在底层架构上都选用了类似的技术路径:滚柱丝杠直线执行器混动架构。
在机器人学界,这被认为是极具挑战的方案,需要复杂的运动学建模和极高精度的力矩控制。但其优势同样显著:步态更加自然,能效利用率更高,更便于任务执行,环境适应性更强。

开普勒和特斯拉人形机器人行走步态对比
对此,我们特地咨询了开普勒公司,希望从这家国产厂商的视角,了解背后真实的技术考量。
01
直膝步态,为什么是“难而正确”?
开普勒方面表示,之所以选择直膝步态和滚柱丝杠直线执行器混动架构,是因为这是一条“难而正确”的路。
对于双足机器人而言,直膝行走几乎是最难的动作之一。相比之下,弯膝步态更容易实现:重心低,结构稳定,对控制算法和硬件精度的要求相对宽松。因此,多数机器人公司会选择弯膝方案来保证“能走”。但问题也很明显:动作笨拙,能效低下,离“像人”还有很大距离。
开普勒坚持认为,人形机器人既然要走路,就必须“像人一样走”。这也是他们选择直膝步态的根本逻辑。
近日,开普勒人形机器人K2大黄蜂迎来全新步态升级,并正式发布了国内首例“混合架构抗扰动”步态实录视频。
在这段视频里,K2大黄蜂面对复杂的环境时始终保持稳定的行走节奏。这种表现,直观地体现了直膝步态在复杂环境中的可行性和优势。
开普勒方面表示,这款机器人以直线执行器为核心动力,相当于“腿部肌肉”,提供主要能量;再结合旋转电机等驱动方式,实现动作微调和步态切换,从而适应不同地形。
这一方案已被包括特斯拉、小鹏等在内的国际前沿人形机器人团队验证,并逐渐成为行业共识。
其中的核心部件是行星滚柱丝杠,一种将旋转运动转化为直线运动的精密传动装置。它通过“行星传动+螺纹啮合”的复合原理实现高负载、高精度传动,优势主要体现在三个方面:
1.高能效比与高精度:行星滚柱丝杠通过滚动摩擦传递动力,能量损耗较低,可高效地将伺服电机的旋转运动转化为直线运动,其能量转化效率可以达到81.3%左右;低摩擦设计(摩擦系数低于传统丝杠)减少热变形和能量损耗,确保长期运行下的定位精度。
2.超强承载能力:行星滚柱丝杠通过螺纹滚柱作为滚动元件,在螺母与丝杠间形成众多接触线,大幅提升受力面积。其结构设计使承载能力远超滚珠丝杠。在同等负载力下,行星滚柱丝杠体积更小,且能适应恶劣工况(如高冲击、多粉尘环境)。尤其适用于如重载机械、工业机器人关节等。
3.运动平稳性与耐久性:螺纹滚柱的连续接触消除了滚珠丝杠中可能出现的冲击振动,运行更平稳,降低噪音和机械磨损。接触应力分散显著降低元件疲劳风险,寿命可达滚珠丝杠的数倍,尤其适合高强度工业环境。
正是这种结构,让K2“大黄蜂”在保持人类自然步态的同时,兼具稳定性与耐久性。从特斯拉Optimus到开普勒K2“大黄蜂”,这不仅是“看起来像人”的选择,更是经过验证的效率与稳定性兼顾的最优解。
02
困难重重,开普勒有何解法?
正如开普勒公司所示,直膝步态的“正确”,并不意味着它“容易”。尤其是在采用滚柱丝杠混动架构的前提下,控制难度和工程复杂度几乎是指数级上升。
第一重难点在于丝杠力学。
市面上常见的准直驱机器人,多数采用相对简单的串联结构,控制逻辑更直观。但在开普勒的混合架构里,行星滚柱丝杠直线执行器与旋转电机协同驱动,每一个关节都需要在高负载和复杂动作下保持精确控制。
这就意味着,上层控制器规划的角度、速度和力矩,要实时转化为丝杠长度、速度与推力,再由电机执行。而直线电机反馈的数据,又要反向换算成关节的角度、速度与力矩。这种复杂的双向映射关系,就是所谓的“丝杠力学”,也是实现自然步态的前提。

第二重难点在于仿真与现实的差距(Sim-to-Real Gap)。
如果说丝杠力学是精度上的挑战,那么仿真与现实之间的差距,则是落地性上的鸿沟。几乎所有人形机器人研发团队都会面对所谓的 Sim-to-Real Gap:在虚拟仿真环境里跑得流畅自然,一旦切换到真实世界,就问题频出。
原因在于,仿真世界往往过于理想化。它可以忽略关节摩擦、材料变形、地面微小的不平整;传感器数据也被假设为“完美”,而现实中的 IMU 漂移、力矩传感器噪声、视觉延迟都会积累成姿态偏差;仿真环境通常是平坦的地面,但现实中机器人要面对的是坑洼、斜坡、突发外力甚至光照变化。
更麻烦的是,真实的执行器存在响应延迟和死区效应,指令发出去并不会“秒到”;通信网络也有延时,这些微小的差异足以让看似完美的步态在实机上完全走样。
针对这两大难题,开普勒的应对思路是“双管齐下”。K2“大黄蜂”采用直线执行器的混动架构,在力控环节中引入丝杠力学的精密计算,并辅以强化学习与模仿学习的结合,从而同时攻克了步态的灵活性与自然性问题。在复杂环境下,它能够完成稳定而灵活的步态切换;在日常行走中,则展现出类人直膝步态的自然效果。

在具体方法上,强化学习承担了最基础的“教学”角色。通过大规模并行的仿真实验,数千台虚拟机器人被置于各类复杂场景之中:不同地形、不同执行器特性,甚至绊倒、滑倒或外力干扰。GPU加速让这种试错可以在极短时间内完成,最终形成能够应对突发情况的鲁棒性控制策略。
与此同时,模仿学习则让“大黄蜂”具备了更接近人类的动作特征。借助高保真的物理仿真器,仅需数小时便能生成相当于数年的人体步态数据。机器人不仅学会了脚跟先着地、脚尖离地的细节动作,还能做到手臂与腿部的自然摆动,使整体步态更符合人类直觉。
在整个学习过程中,奖励函数发挥了关键作用,它像“老师”一样为机器人指引方向:哪些行为更高效、更稳定,哪些策略更能抵御扰动。
经过持续的反馈与优化,K2“大黄蜂”逐步具备了在真实环境中高可靠行走的能力。相比单纯的仿真训练,这种方法让它不仅能在实验室中走得稳,更能在工业生产线、物流仓储等高复杂度场景中经受住各种干扰,实现自然且稳定的仿人步态。
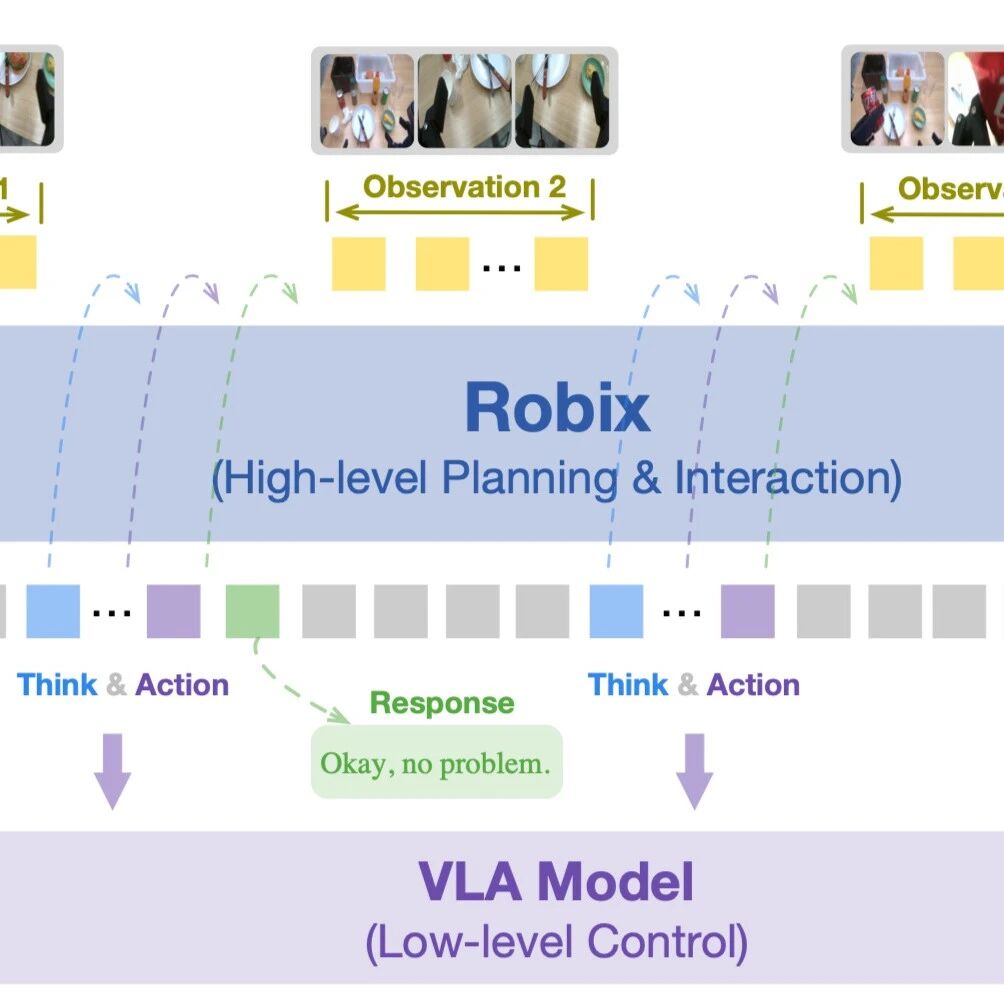
同时,开普勒K2大黄蜂目前已经可以通过分层模型 VLA+语义识别,听懂自然语言指令,按照需求给大家分发物品,完成多种任务。
基于仿真数据训练和海量的真机数据,K2大黄蜂可以进行持续动态学习与训练,不断提高执行任务的成功率,成为各领域操作“专家”。


03
突破之后,人形机器人能去到哪?
当技术逐渐走出实验室,最先迎来考验的往往是产业一线。值得注意的是,特斯拉、开普勒和小鹏这三家在人形机器人上采取了类似架构的企业,不约而同地都选择了汽车工厂作为试点场景。
对特斯拉而言,Optimus 被定位为未来工厂的新工人。无论是早期的视频里搬运零件,还是马斯克口中“80%市值都将来自机器人”的愿景,汽车生产线始终是其最重要的应用起点。

小鹏的人形机器人同样强调与新能源车产业链的协同,希望通过机器人在制造、检测环节的应用,为整车生产带来柔性和效率。

开普勒的 K2“大黄蜂”则已经走进了上汽通用等工厂场景中,实地完成了搬运与协作测试,用实机案例验证了其在工业环境下的稳定性与适应性。

但与特斯拉和小鹏相比,开普勒在几个维度上展现出了更为务实的优势。
第一是成本。K2“大黄蜂”是目前市面上第一款正式开启量产预售的商业化行星滚柱丝杠人形机器人,已推出双足基础版、双足开发版以及轮式开发版三种型号,起售价24.8万元。
按照开普勒提供的估算模型,如果在工厂场景替代两班人工,约 1.5 至 1.8 年即可收回成本,之后则可以持续释放劳动力替代带来的成本红利。这意味着,相比于此次定价高达20-50万美元的特斯拉Optimus,K2 “大黄蜂”在经济性上显得更具可行性。
第二是负载能力。K2“大黄蜂”的双臂可实现30公斤级别的稳定搬运,适合物流、分拣以及汽车零部件的搬运场景,这一点对于重载工况频繁的汽车工厂尤为关键。相比之下,Optimus 在重载演示上尚未展示出同等的成熟度。
第三是续航时间。开普勒在设计之初就将“长时间工作”作为目标之一。K2大黄蜂号称“充电1小时,连干8小时”, 能够在持续运转中保证能效和稳定性,支持跨班次作业。
前不久的WAIC 2025上,K2“大黄蜂”在直播镜头下接连完成了走路、分拣、上下料、交互游戏等动作,并在无更换电池或外接供电的情况下,持续运行整整8小时,足以证明其续航能力。

此外,开普勒机器人拥有软硬件全栈自研能力,其硬件自研率达80%以上,且与国内多家头部智能制造伙伴携手,这也让开普勒商业化落地具备领先优势。
更重要的是,这次升级并不仅仅意味着技术突破,还为开普勒机器人打开了更广阔的应用空间。
在商业场景中,K2“大黄蜂”可以走进科研教育,支持机器人学、智能控制等课程与实验,推动学术研究和人才培养;也可以化身展厅里的解说员,通过仿人动作与语音互动展示科技魅力;甚至还能在数据采集环节大展身手,支持远程操作、多模态采集和训练全流程,为人工智能算法提供高质量的数据和验证平台。
在工业场景,K2“大黄蜂”展现出更广泛的适应性:物流搬运中,它能够稳定搬运 30 公斤级别的物料,满足仓储、分拣和配送的需求;智能制造中,它能与生产线工人协同作业,提升自动化水平和柔性制造能力;在特种任务场景中,它甚至能够在危险工况中替代人工,保障效率与安全。
04
写在最后
从大洋彼岸的特斯拉,到本土的开普勒与小鹏,滚柱丝杠直线执行器混动架构和直膝步态正逐渐成为人形机器人研发的共同方向。
在这场新兴的赛跑中,中美无疑同处第一梯队。美国有特斯拉这样以资本与品牌为后盾的科技巨头,中国则涌现出像开普勒这样的创业公司,在技术和应用上不断追赶甚至局部超越。
未来几年,人形机器人的竞争焦点,将不仅是“谁能做出来”,更是“谁能先用起来”。从技术突破到规模落地,这场跨越太平洋的较量才刚刚开始。
9月11日,2025(第二届)人形机器人感知与控制峰会暨具身智能数据采集与训练技术论坛即将召开。该大会聚焦“感知-控制-数据”核心环节,推动技术突破与产业落地。敬请期待!
后台回复“加群”,加入“人形机器人场景应用联盟交流群


推荐阅读
本体
供应链
场景应用