ARTS 2025
为了促进自主机器人领域一线青年学者/工程师的交流,推动学术界与企业界的交融与产学研合作,搭建一个深度、纯粹的技术交流平台,中国自动化学会决定主办自主机器人技术研讨会(Autonomous Robotic Technology Seminar,简称ARTS)。
了解线下会议详情
请扫码加入【ARTS 2025 交流群】

主办单位:中国自动化学会

柔性人工肌肉技术及其机器人应用
报告摘要:
驱动技术对于实现机器人所需的力和位移输出至关重要。高功率密度、高能量密度和服役稳定的驱动器一直是机器人系统中关键的组成部分,它们的发展也推动着新型机器人系统的涌现,包括新形态、新功能和新特性的实现。介电弹性体驱动器作为一种前沿驱动技术,在过去二十多年里取得了显著进展,展现出高应力、大行程、高柔性和强环境适应能力等优异特性。然而,它仍面临着多种挑战,尚未实现大规模应用。本报告将介绍我们在介电弹性体驱动器寿命保障、创新制备工艺以及机器人应用方面近年来取得的进展。结合其他类似原理的人工肌肉应用案例,我们将探讨柔性人工肌肉在各种尺度机器人系统中的应用形式和前景。同时,还将总结该技术发展中所面临的核心挑战和机遇。

潘佳
从独行到共舞:混合人群中的机器人导航与协同调控
报告摘要:
随着腿足机器人与自动驾驶技术日益成熟,机器人的物理移动能力已接近临界点,足以在复杂环境中可靠行走。然而,真正的挑战在于如何让机器人融入并服务人类社会。本报告将探讨下一代机器人技术的核心挑战:在密集混合人群中实现安全、高效、且符合社会规范的移动与协同。重点围绕两个关键问题展开:
1. 个体智能(被动适应):单个机器人如何感知并理解人类的社会规范(如个人空间、通行礼仪),在人群中实现无碰撞、自然、可预测的导航。
2. 群体智能(主动调控):多机器人系统如何通过协同合作,不再仅仅被动适应人群,而是能主动、轻柔地对人群流量和行为进行正向调节(如疏导拥堵、形成通道、引导方向)。

报告主题:
兼顾高精度和高泛化性的灵巧手和灵巧操作
报告摘要:
机器人灵巧操作通过多指手动态建立与脱离接触来实现对于被抓取物体的精细操作。相较于基于学习的灵巧操作方法,基于模型的方法无需针对每项任务进行大量数据收集,提供了一种高效高精度的解决方案。然而,由于物理接触的复杂性,现有基于模型的方法在高效在线规划和处理建模误差方面面临挑战,限制了其实际应用。为解决现有方法的不足,本报告提出一种新型的层次化灵巧操作框架,通过运动-接触联合建模实现了动作与接触的协同优化。大量实验表明,所提出的方法能够兼顾灵巧操作的高精度和高泛化性。

生物混合磁驱微机器人
报告摘要:
“生物混合微机器人”是以生物细胞、生物材料和功能性物质有序互联集成,具备生物组织特性与机器人仿生感知、运动、决策能力的新概念机器人,在活体环境适应性与医用任务作业安全性方向性能优异,有望变革靶向给药、组织修复及活体采样等重大疾病诊疗技术。本报告重点介绍通过模拟细菌、水母等水生生物行为,将生物混合微机器人作为拥有理想生物学特性的软体执行器,研究了其高效运动、自主决策及多模态运动控制方法,并开展了活体封闭环境采样、运输、投递等应用探索,为癌症、血栓等疾病精准靶向治疗提供了新思路。

报告主题:
面向复杂恶劣环境的具身感知与操作
报告摘要:
由于制造业的转型发展,复杂恶劣环境下的人员替代具有极高的紧迫性和必要性。然而,在高温、高危等恶劣环境下的感知与操作面临一致性差、感知精度低、泛化性要求高的难题。本报告将主要面向港口和钢铁场景,在感知层面,介绍场景相关、小样本、 需求不一致的泛化感知方法。在操作层面,主要面向柔性绳索, 介绍防摇和模仿学习技术在无人起重机抓放的实际落地案例。最后,本报告也将进一步介绍大模型在工业场景中的初步应用,探讨大模型技术提升工业场景的动态适应能力,降低复制成本的落地实施可能性。

从语义定位建图到空间智能
报告摘要:
随着智能机器人在复杂动态环境中的广泛应用,定位与建图(SLAM)技术正经历着从传统几何驱动的模块化架构,向面向语义空间感知的端到端框架的演进。本报告聚焦于“如何让机器人在真实世界中实现稳定、可解释且可部署的定位与建图”,系统介绍课题组在语义 SLAM、全局鲁棒定位与动态环境建图方面的最新进展,包括四维实例感知语义分割、物体级语义定位与建图,以及端到端的鲁棒重定位,最后探讨 SLAM 面向空间智能发展的潜在路径与未来挑战。
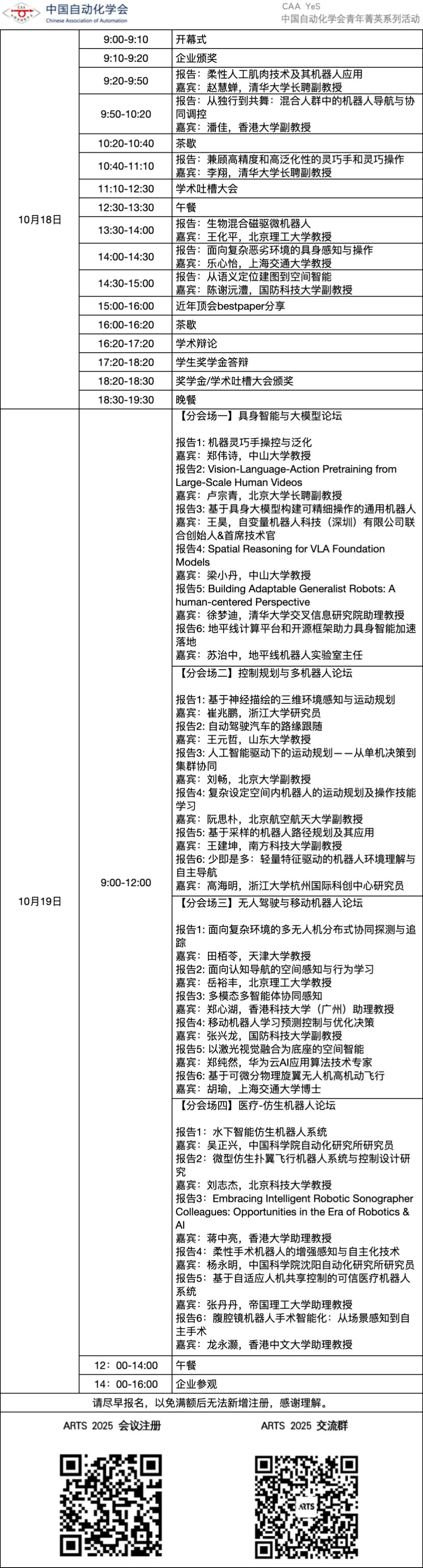
除主旨报告外,大会特设四场分论坛(按名称首字母排序),共32位嘉宾,其中24位报告嘉宾:
具身智能与大模型 控制规划与多机器人 无人驾驶与移动机器人 医疗-仿生机器人


中国自动化学会会员注册链接: https://www.caa.org.cn/Content/10.html ARTS 2025会议注册链接: https://www.cacpaper.com/register/142/user/preRegist
联系电话:19016985878(同微信)
联系邮箱:liyuanyuan@shenlanxueyuan.com