点击上方蓝色字,关注我们

导读



引言
常见脑神经功能性重大疾病如脑肿瘤、帕金森、强迫症、癫痫等患病率随着年龄逐年增加,极大影响正常生活及质量。常规诊疗术式包括穿刺活检、深部电极植入、射频消融、肿瘤切除、局部给药等。传统框架式立体定向手术通过术前影像和框架匹配实现手动靶点定位,仍存在经验要求高、操作复杂等难题;而无框式非核磁兼容立体定向机器人手术结合机器臂和术前影像实现自动靶点定位,但因无术中实时影像和颅内环境监测等,无法解决脑漂移问题。术中磁共振影像引导技术能够在操作过程中同步实现结构和功能评估,从而适应组织形变并规避关键解剖区域。然而,实现术中磁共振脑神经介入手术仍然存在以下挑战:1)多自由度、大范围需求与高精度定位的挑战;2)受限空间与长距精准穿刺的挑战;3)术中磁共振成像难以同时兼顾时间与空间分辨率。且强磁场下的磁共振环境与磁共振成像的高敏感性限制了机器人材料、驱动及传感技术的选择。
视频1-临床背景及研究成果总体介绍
本论文提出了一种术中磁共振影像导航的脑神经介入手术机器人系统,首创机器人气液宏微驱动、仿生蠕动穿刺针驱动及术中宏微成像技术(图1A)。分别设计了:气液混合宏微驱动的8自由度立体定向系统,包含用于全局定位的4自由度快速气动宏驱动模块和用于精准局部微调的4自由度液压微驱动模块;针对长距靶向穿刺,研制了具有小型化、易制造、高稳定性特点的2自由度仿生蠕动式软体驱动器,其仿生推进机制可实现精准稳定的穿刺介入操作。宏微磁共振成像能在介入过程中实现交互导航与闭环控制,并精确识别接近目标时的局部靶点。论文通过体模、人体标本及活体动物实验开展了详细的功能和性能验证。

图1-术中磁共振影像导航的气液混合宏微驱动脑神经介入手术机器人系统
气/液混合宏微驱动技术
本研究开发了8自由度气液混合驱动系统,包扩4自由度气动宏驱动模块与4自由度液压微驱动模块。宏驱动提供大范围的全局定位,工作空间可充分覆盖人脑。微驱动采用双平面并联机构,实现精细调整。系统在3T磁场环境下表现出优异兼容性(信噪比损失≤2.3%,几何畸变≤0.18%),末端夹持点刚度≥12.04 N/mm,为脑神经介入提供了大范围高精度立体定向能力。

图2-气液混合驱动脑神经介入机器人驱动架构设计与性能评估
仿生蠕动式软体驱动
受生物体蠕动运动机制的启发,突破传统刚性传动定式,开发了2自由度的螺旋蠕动式软体驱动器,实现紧凑的穿刺针旋转及输送运动。基于蠕动运动的行波推送原理实现穿刺针旋转与平移的独立控制。在1.2-1.7 Hz工作频率下,平移速度>0.2 mm/s,旋转速度>0.5 rad/s,穿刺力>0.8 N。实验测得最大锁定力为13 N,具备较强穿刺针锁紧性能。该研究解决受限空间下旋转-线性双自由度解耦与长行程精准穿刺的关键技术难题。

图3-仿生2自由度软体驱动器的设计与性能测试
视频2-仿生2自由度软体驱动器的动态性能仿真及测试
宏微磁共振成像技术
针对术中导航与精准定位的双重需求,开发了自适应磁共振成像策略:远离靶点处(≥10 mm)采用宏成像(1 mm²分辨率,2.5 s/帧)监控穿刺针连续推进;靠近靶点处(<10 mm)切换至微成像(0.39 mm²分辨率,17.9 s/帧)引导穿刺针精细推进。rFOV-FSE序列相比全视野序列的空间分辨率提升2.6倍,并有效抑制伪影。结合SAM算法实现亚像素级针尖跟踪,为机器人闭环控制提供高精度视觉反馈。

图4-术中磁共振宏微成像技术
视频3-术中磁共振宏微成像动态展示
多场景实验验证
通过体模、人体标本及活体动物实验验证机器人系统性能:模拟脑深部定位的体模实验靶向精度为0.39±0.12 mm(N=7);人体标本实验的脑深部核团定位精度为0.68±0.13 mm(N=4);活体大动物(猪)伏隔核定位精度为0.14 mm(N=1)。组织学分析显示针道位于白质区,神经元形态正常。以上实验证实该机器人系统具备亚毫米级精准脑深部介入能力。
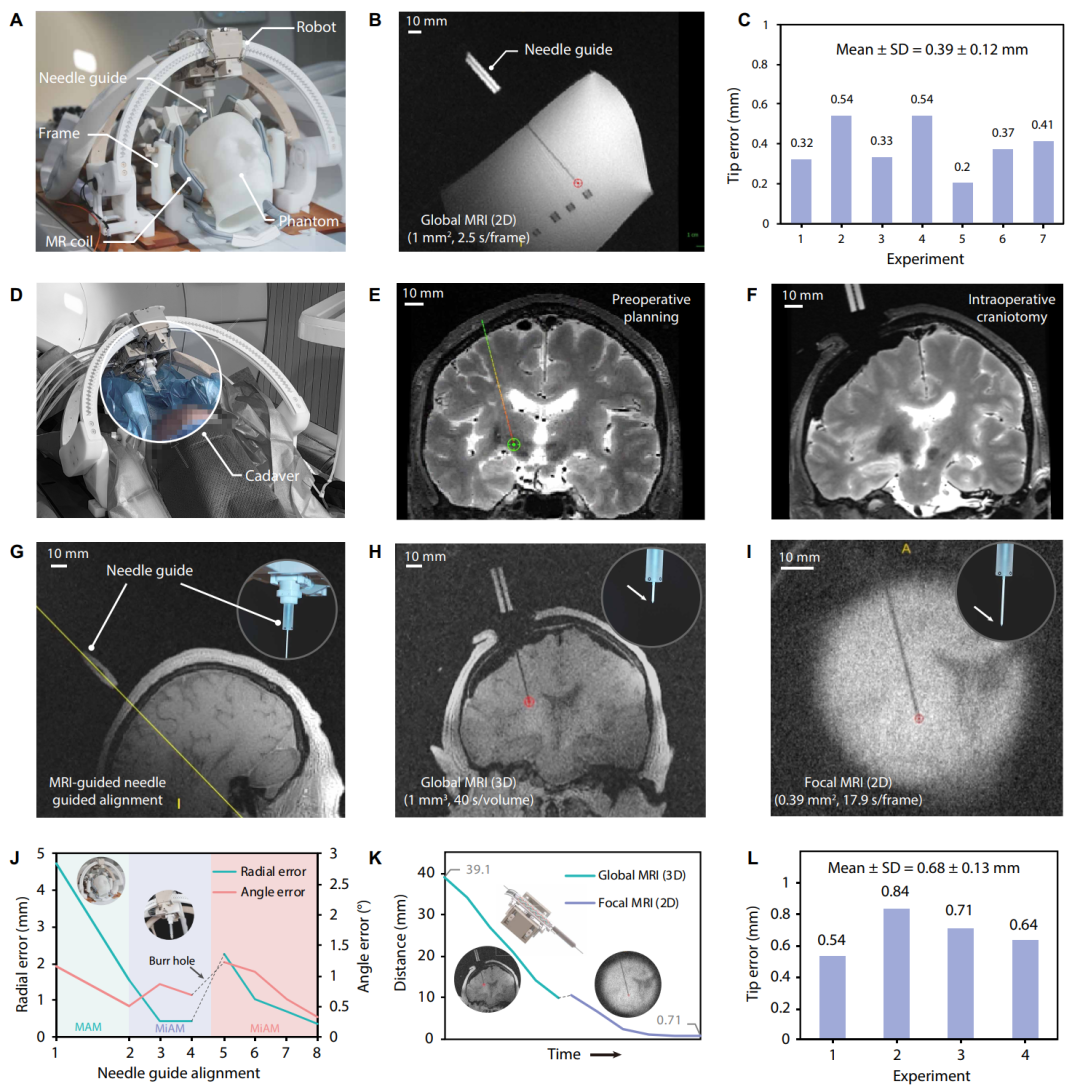
图5-模拟临床核团定位的体模实验与人体标本实验结果

图6-活体动物实验的脑深部伏隔核定位结果
总结
本论文解决了脑神经介入磁共振兼容机器人存在的精度不足、磁共振兼容性差、工作空间有限、术中磁共振成像的时空制衡等难题。提出了气液混合宏微驱动、仿生蠕动软体驱动及宏微成像等策略。通过理论建模、结构设计、序列开发、控制系统搭建与临床前验证的系统性研究,研制了具备术中磁共振导航能力的亚毫米级定位、大工作空间、高刚度的磁共振兼容脑神经介入机器人系统。该成果可为脑神经介入手术精准化、术中实时磁共振导航及磁共振微创诊疗一体化系统构建提供技术支撑,同时为磁共振引导下智能诊疗装备研发与多模态影像融合手术机器人发展开辟新路径。
S. Huang, Z. He, Y. Chen, J. Chen, S. Hong, Y. Zhang, L. Xu, Y. Pan, S. Ma, L. Xuan, Q. Meng, Y. Yang, Y. Xu, Z. Lin, C. Lou, C. Zhou, W. Chen, B. Sun, Q. Sun, Y. Feng, A. Gao, G.-Z. Yang, Hybrid pneumatic-hydraulic actuation for MRI-guided robotic stereotactic neurointervention. Science Advances 11, eady3624 (2025).
Link: https://www.science.org/doi/10.1126/sciadv.ady3624
团队简介
瞄准医疗机器人技术国际前沿研究方向,对接国家高端医疗器械装备产业发展战略需求-上海交通大学医疗机器人研究院是以英国皇家工程院院士、Science Robotics创刊主编杨广中教授为首席科学家的研究团队。研究院围绕肿瘤、心血管、神经退行性疾病等重大疾病的早期诊断和个性化治疗,聚焦研发灵巧、智能和微创的医疗机器人技术。其目标和愿景是促进跨学科合作、加速研究成果的转化、培养专业人才和加强国际合作,深耕医疗机器人关键技术的创新研究,研发以柔性机器人和人工智能技术为核心的新一代医疗装备,创建多学科人才培养和产业孵化基地,促进创新机器人技术的临床转化。









![2026年中国智慧城市轨道交通行业政策、市场规模、竞争格局及发展前景:市场规模达698.36亿元,技术融合驱动行业快速发展[图]](https://xtechcon-static.oss-cn-chengdu.aliyuncs.com/xtimes/xtimes/images/2026-06-14/6a2dfda0663f6.jpeg)


![2026年中国陶瓷电路板行业政策、发展现状、竞争格局及未来趋势预测:政策与需求双轮驱动,市场规模增至32.9亿元[图]](https://xtechcon-static.oss-cn-chengdu.aliyuncs.com/xtimes/xtimes/images/2026-06-07/6a24c34cea4e7.jpeg)
