背景
在全球碳中和目标引领与航空业绿色转型需求的双重驱动下,电动飞机被视作未来商业与休闲飞行的核心发展方向。相较于传统燃油飞机,电动飞机依托电力驱动,能够显著降低对化石燃料的依赖,减少温室气体与污染物排放,契合环保可持续的发展理念。然而,电动飞机的大规模商业化应用始终面临关键瓶颈——能量存储与续航能力的矛盾。现有电动飞机依赖的电池系统,其能量密度远低于传统航空燃油,这直接导致飞机航程受限,难以满足中长距离飞行需求,极大限制了电动飞机在支线运输、城际通勤等场景的推广。为突破这一技术桎梏,行业亟需一种兼具环保属性与续航保障的动力解决方案。本文所提出的电动飞机混合推进系统,正是针对这一行业痛点的创新探索,通过融合电力驱动与辅助动力发电技术,为电动飞机的续航拓展提供了全新路径。

当前技术存在的问题
当前电动飞机动力技术体系中,纯电动推进方案的局限性已成为制约行业发展的核心障碍,具体体现在以下多个维度:
首先,能量密度失衡导致航程严重受限。传统锂离子电池的能量密度通常在150-250 Wh/kg之间,而航空煤油的能量密度高达12000 Wh/kg,两者差距超过40倍。这一悬殊差距使得电动飞机若仅依赖电池供电,续航里程往往局限于100-300公里,仅能满足短距离低空飞行需求,无法覆盖城际支线等主流航空场景。以现有电动垂直起降(eVTOL)飞机为例,即便采用高能量密度的锂铁磷酸电池或镍锰钴电池,其实际续航仍难以突破500公里,且负载能力会随续航需求增加而大幅下降。
其次,电池技术瓶颈难以短期突破。一方面,现有电池的充放电循环寿命与安全性限制了其在航空场景的应用,频繁快充会加速电池衰减,而高空低温环境可能引发电池性能波动,甚至诱发安全风险;另一方面,电池能量密度的提升已逼近材料科学的物理极限,近年来行业内的技术迭代多为小幅优化,尚未出现能够颠覆现有格局的突破性技术,短期内难以实现能量密度的量级式提升。
再者,现有解决方案存在结构性缺陷。部分企业尝试通过增加电池数量延长续航,但这会导致飞机重量呈线性增长,进而增加能耗,形成“重量-能耗”的恶性循环,同时还会影响飞机的机动性与起降性能;另有方案探索燃料电池与电池的组合模式,但燃料电池系统体积庞大、成本高昂,且加氢基础设施建设滞后,难以实现规模化应用。此外,传统混合动力方案多为燃油发动机与电动系统的简单叠加,缺乏一体化集成设计,存在动力匹配不佳、能量转换效率低、系统可靠性不足等问题,无法充分发挥混合推进的技术优势。
最后,应急能源供应与系统冗余设计不足。纯电动飞机在飞行过程中若遭遇电池故障或能量耗尽,缺乏有效的备用能源补给机制,极易引发飞行安全事故。而现有混合推进方案中,辅助动力系统与主能源系统的协同控制逻辑不完善,难以根据飞行工况动态调整能量分配,无法实现续航能力与环保效益的最优平衡。这些问题相互交织,共同制约了电动飞机的技术成熟度与商业化进程,亟需一套系统化、集成化的创新解决方案予以破解。

本文的解决方案
本文提出的电动飞机混合推进系统,通过模块化设计、一体化集成与智能控制技术,构建了“主电池能量+辅助动力补能”的双能源架构,从系统结构、核心部件、动力分配、控制逻辑等多个维度,全面解决了现有电动飞机的续航与可靠性问题。该方案的核心设计在于将可拆卸式动力单元吊舱与电动飞机主体结构有机融合,实现能量存储与动态补给的协同运作,其详细技术细节如下:
3.1
系统整体架构设计
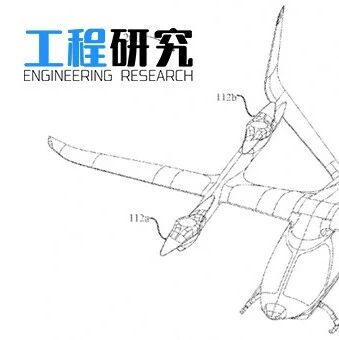
该混合推进系统的核心架构由电动飞机主体与至少一个动力单元吊舱104构成(如图1、图2所示),形成“机身-横向延伸元件-动力吊舱”的一体化布局。电动飞机200包含机身204、横向延伸元件208、推进器(升力推进器212与推力推进器216)及能量源400四大核心组件;动力单元吊舱104通过吊舱支架136可拆卸式连接于横向延伸元件208的下表面,通过功率输出线132与机身能量源400实现电气连接,形成“主能源存储+辅助能源生成”的双回路系统。

图1 为示例性动力单元吊舱系统的示意图

图2 为示例性电动飞机的示意图
如图2所示,电动飞机200的机身204采用半硬壳式结构设计,内部集成能量源400,该能量源由多个电池模块串并联组成,可根据飞行需求灵活配置电压与容量,支持锂离子、锂金属等多种电池chemistry。横向延伸元件208作为机翼结构的核心组成部分,采用升力生成体设计,其横截面为NACA系列翼型(如NACA 0012),兼具结构支撑与气动升力功能,为动力单元吊舱104提供稳定的安装基础。推进系统包含至少两个升力推进器212与一个推力推进器216,升力推进器212通过第一推进器吊臂220与第二推进器吊臂224垂直连接于横向延伸元件208,推力推进器216则安装于机身尾端,所有推进器均通过高压线路与能量源400及动力单元吊舱104实现电气连接,可根据飞行阶段动态切换动力来源。
3.2
核心部件设计与功能实现
-
动力单元吊舱104(图1)
动力单元吊舱104是该混合推进系统的核心创新部件,其整体封装于流线型短舱116内,短舱采用水滴形气动设计,可有效降低边缘飞行时的气动阻力,且避免干扰机翼表面的气流场。吊舱内部集成五大核心组件:辅助动力单元(APU)108、燃油箱112、本地控制器128、电源140及功率输出线132。
辅助动力单元108作为能量生成核心,可采用涡轮发动机、往复式发动机或燃料电池等多种技术路径,其功率等级可根据飞机需求灵活配置,涵盖低于100kW、100-150kW及150-200kW三个区间。APU 108的核心功能是将燃油化学能转化为电能,不直接产生推力,通过驱动内置发电机实现机械能到电能的转换,其输出电能经电源140调理后,通过功率输出线132传输至机身能量源400或直接供给推进器。
燃油箱112与APU 108形成流体连通,内部存储航空煤油、无铅煤油或氢气等燃料,通过燃油泵与燃油阀实现燃料的精准输送。燃油箱112配备压力传感器与液位监测模块,其状态数据通过本地控制器128实时反馈至飞行控制器404,确保燃料供应的安全性与稳定性。短舱116的前端设置进气口120,采用NACA导管设计,为APU 108提供冷却气流与燃烧空气;后端设置排气口124,与APU 108的排气系统直接连接,优化废气排放路径。
本地控制器128作为吊舱的核心控制单元,采用微控制器(MCU)与数字信号处理器(DSP)的异构架构,通过CAN总线与机身飞行控制器404及吊舱内部组件实现通信连接。其核心功能包括:控制燃油泵的启停与流量调节、监测APU 108的运行状态(转速、温度、输出功率)、实现与机身能量源400的协同充放电控制。电源140作为电压转换核心,将APU 108输出的高压交流电转换为28V低压直流电,为本地控制器128、燃油泵等辅助部件供电,同时提供高压直流输出用于能量源400充电。
-
能量源400与配电系统(图3、图4)
能量源400由多个电池模块组成,每个模块包含若干电池单体串并联,通过电池管理系统(BMS)实现状态监测与均衡控制。如图3所示,配电系统500采用双高压前端架构,包含第一高压前端504与第二高压前端508,两者通过互锁组件604实现电气连接与故障隔离。

图3 为混合动力飞机的示例性配电系统框图
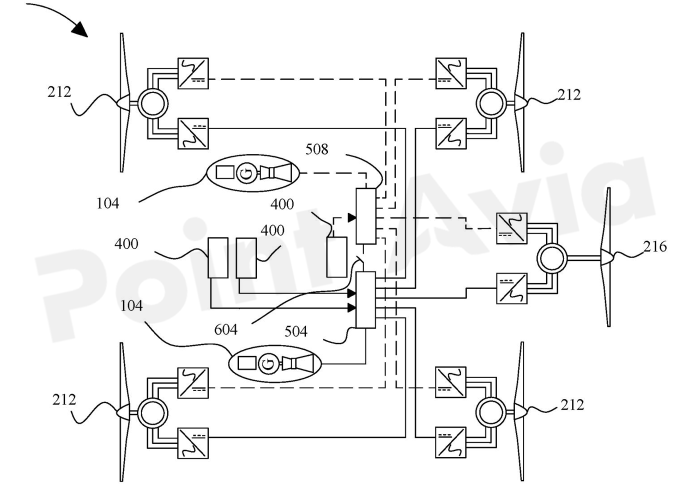
图4 为示例性飞行控制器的示意图
第一高压前端504同时与能量源400的两个电池模块及动力单元吊舱104的功率输出线132连接,可同时接收电池放电能量与APU 108生成的电能,并根据飞行控制器404的指令,将电能分配至升力推进器212与推力推进器216,或反向为能量源400充电。第二高压前端508与另外的电池模块连接,主要作为冗余备份,在第一高压前端故障或高功率需求场景下启动,确保动力供应的连续性。
互锁组件604采用固态继电器设计,由飞行控制器404实现状态控制,在正常工况下保持闭合状态,使双高压前端形成并联供电;当检测到任一高压前端故障时,互锁组件604迅速断开,实现故障隔离,避免故障扩散。配电系统的双回路设计大幅提升了系统可靠性,满足航空级安全标准。
-
飞行控制器与智能控制逻辑(图5)
飞行控制器404作为系统的“大脑”,采用分布式控制架构,包含信号转换组件708、可重构硬件平台716、逻辑组件720、芯片组组件728及自主机器学习模型,实现动力分配、飞行姿态与能量管理的一体化控制。
如图5所示,信号转换组件708负责将传感器采集的模拟信号(如APU转速、电池电压、推进器转速)转换为数字信号,并通过数据预处理与误差校正算法提升信号精度。可重构硬件平台716基于FPGA架构,支持控制算法的动态重构,可根据飞行阶段(起飞、巡航、降落)自适应调整控制策略。逻辑组件720采用多核处理器架构,实时计算飞行要素724(包括推力、扭矩、空速、高度等参数),并通过芯片组组件728实现与推进器、APU及能量源的通信。

图5 为示例性机器学习模块的示意图
自主机器学习模型是智能控制的核心,其基于飞行要素724与飞行员信号736构建训练数据集,通过监督学习(如随机森林回归)与强化学习(如深度确定性策略梯度)算法,实现动力源的动态优化分配。例如,在巡航阶段,模型可根据电池剩余电量(SOC)与飞行距离,自动调节APU 108的输出功率,使能量源400维持在最优SOC区间;在起飞或突发高功率需求场景下,模型可同时调用能量源400与APU 108的输出,为推进器提供峰值功率支持。
3.3
系统集成与协同工作流程
该混合推进系统的协同工作流程围绕飞行全生命周期展开,通过多部件的动态联动实现续航拓展与能效优化,具体分为三个核心阶段:
-
起飞阶段:起飞过程需消耗大量峰值功率,此时飞行控制器404同时激活能量源400与动力单元吊舱104。能量源400提供主要峰值功率,APU 108以最大功率运行,通过功率输出线132向推进器直接供电,同时为能量源400补充部分电能。升力推进器212满功率运行提供垂直升力,推力推进器216逐步提升功率实现水平加速,双高压前端504、508并联工作,确保动力供应的充足性与稳定性。
-
巡航阶段:巡航阶段为稳态运行工况,能耗相对平缓。飞行控制器404根据电池SOC与剩余航程,动态调整APU 108的输出功率。当电池SOC高于60%时,APU 108以低功率运行,仅补充飞行过程中的能量损耗;当电池SOC低于40%时,APU 108提升至额定功率,为能量源400充电的同时为推进器供电。如图6所示,该阶段动力单元吊舱104的短舱116与机翼形成良好的气动协同,确保整机气动效率不受影响。

图6 为带有示例性动力单元吊舱系统的电动飞机的侧视图
-
降落阶段:降落阶段能耗较低,飞行控制器404关闭APU 108,仅由能量源400为推进器与航电系统供电。升力推进器212根据高度与速度动态调节推力,实现平稳下降;推力推进器216维持最低功率,确保飞行姿态可控。本地控制器128对APU 108进行停机自检,燃油箱112关闭燃油阀,系统进入降落待命状态。
此外,系统具备完善的故障冗余机制。当能量源400出现模块故障时,飞行控制器404通过高压前端504、508的互锁组件604隔离故障模块,同时提升APU 108的输出功率,确保总动力供应不受影响;当APU 108故障时,系统自动切换至纯电动模式,能量源400全额供电,飞行控制器404根据剩余电量重新规划降落路径,保障飞行安全。
3.4
关键技术优势与创新点
-
可拆卸式模块化设计:动力单元吊舱104通过螺栓等紧固件实现与横向延伸元件208的可拆卸连接(图7),使飞机可根据飞行任务灵活配置吊舱数量或类型,短距离飞行时可拆除吊舱以降低重量、提升能效,长距离飞行时安装吊舱以拓展续航,实现“一机多用”的灵活配置。

图7 为横向延伸元件与动力单元吊舱系统的示例性装配示意图
-
高效能量协同管理:通过双高压前端配电架构与自主机器学习控制算法,实现能量源400与APU 108的无缝协同,能量转换效率较传统混合推进系统提升15%-20%,有效降低能耗损失。
-
高可靠性冗余设计:系统在结构(双高压前端、多推进器)、控制(分布式控制器、互锁组件)、能源(主电池+APU)三个维度构建冗余机制,满足航空业严苛的安全标准,故障容错能力显著提升。
-
气动与结构一体化集成:动力单元吊舱104的短舱116采用流线型设计,与横向延伸元件208的翼型形成气动协同,相比传统外挂式辅助动力系统,气动阻力降低30%以上,有效减少额外能耗。
3.5
系统实现的硬件与软件支撑
该混合推进系统的落地依赖于先进的硬件平台与软件算法支撑。硬件方面,飞行控制器404基于FPGA+MCU的异构计算架构(图5),支持实时信号处理与复杂控制算法运行,其逻辑组件720采用多核ARM处理器,运算能力达1000 DMIPS,可满足多任务并行处理需求;能量源400的电池模块采用高能量密度锂硫电池,能量密度达400 Wh/kg,循环寿命超过1000次;APU 108采用微型涡轮发动机,重量仅为传统发动机的1/3,功率密度达2 kW/kg。
软件方面,系统集成机器学习模块800(图8),通过监督学习算法构建飞行工况-能量需求映射模型,基于强化学习算法实现动态能量分配策略优化。训练数据804包含数千组飞行场景样本,涵盖不同海拔、风速、负载条件下的系统运行参数,模型预测精度达95%以上。此外,系统采用CAN FD总线实现组件间通信,传输速率达10 Mbps,确保控制指令与状态数据的实时传输。
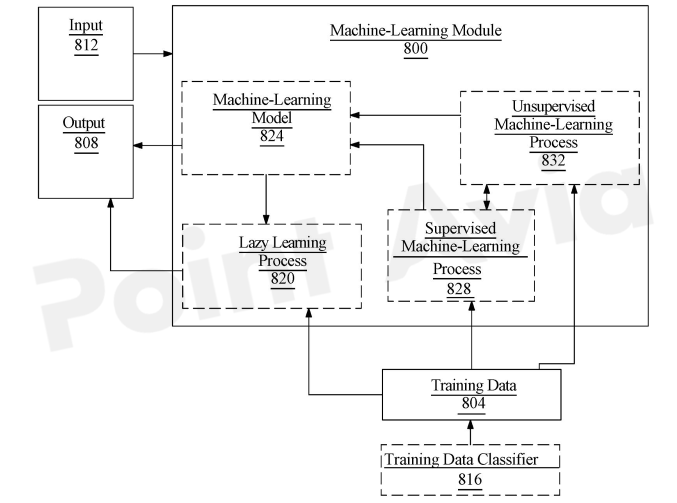
图8 为可用于实现本文所公开的任意一种或多种方法
及其任意一个或多个部分的计算系统框图
来源:公开信息,要点纵航整理
提示:原创文章未经允许,请勿转载