一 产品介绍
苏州三迪斯维最新推出的NexusPickit-S1无序抓取软件,主要针对无固定姿态、随机堆叠的工业零件进行自动化抓取作业,常用于汽车零部件装配、3C 电子分拣、物流仓储拣选等领域。
目前主流无序抓取技术有:视觉引导抓取(高精度零件定位)、力控自适应抓取(柔性适配异形件)、多模态融合抓取(复杂场景协同作业)。我们苏州三迪斯维开发的「NexusPickit」系列平台,是一套面向科研级的高兼容、全栈式开发的无序抓取解决方案,并且与协作机械臂、产线MES系统等可进行深度结合,开发相应的应用。

二 产品性能
手眼标定精度
手眼标定可通过软件->工具->手眼标定->自动采集数据->自动标定,标定流程可在5分钟内完成,标定精度mm级。
抓取精度
综合相机采集点云误差、手眼标定误差、机械臂位置误差、配准误差,当前抓取精度在当前的配置下(KW-MINI结构光相机、越疆CR5协作机械臂)下约在5mm内。

视觉性能
当前使用CPU为i7-13700H,内存24G,节拍约1.2s/个,可通过降低最大匹配个数,加快速度,软件可在Windows,无GPU环境下运行。
开发平台
Visual studio 2019,Qt 5.15.2
编程语言
C++14,python3.8
三「NexusPickit-S1」抓取软件提供的源码模块

四 软件功能介绍

1、判断软件是否标定。
2、确认当前相机和机械臂之间的放置关系。
3、数据是使用本地文件夹(local),还是在线相机(online),如果存在在线相机可通过Open、trigger、Close进行相机开启、触发、关闭等控制。
4、采用的基准配准模型是来源于CAD模型还是场景中直接的模型。
5、采用的图像分割模型是自训练模型或通用分割大模型。
6、基本的点云滤波、降采样等操作,可鼠标右击进行参数设置。
7、配准相关参数设置:分别为内点率,是否忽略末端旋转对于圆心对称的物体,是否显示堆叠物体过滤后的点云配准结果。
8、可阻塞式接收外部Tcp发送过来的触发信号,在软件执行RunCycle功能,自动完成图像采集,点云配准,机械臂抓取一系列任务,可外接PLC进行持续循环触发。
9、RunOnce单步相机触发,点云配准,机械臂抓取。RunCycle阻塞式接收外部PLC给的”trigger”信号,循环执行RunOnce流程。
10、点云采集,配准结果显示界面;
11、相机采集RGB图像显示界面;
12、软件运行日志显示控制台;
13、机械臂相关连接,使能,速度设置界面,当前支持越疆CR系列机械臂;后续将增加其他厂家机械臂。
14、通过串口控制的夹爪,目前支持的是因时机器人的夹爪,后续将陆续增加其他厂家夹爪。
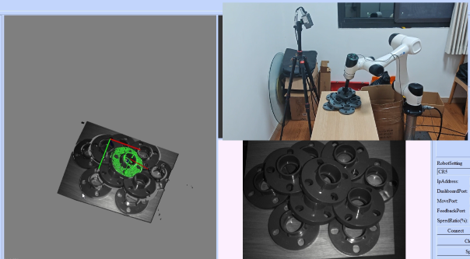
五 抓取效果
六 应用场景

七 购买本套NexusPickit科研套件,将会配套赠送哪些课程?
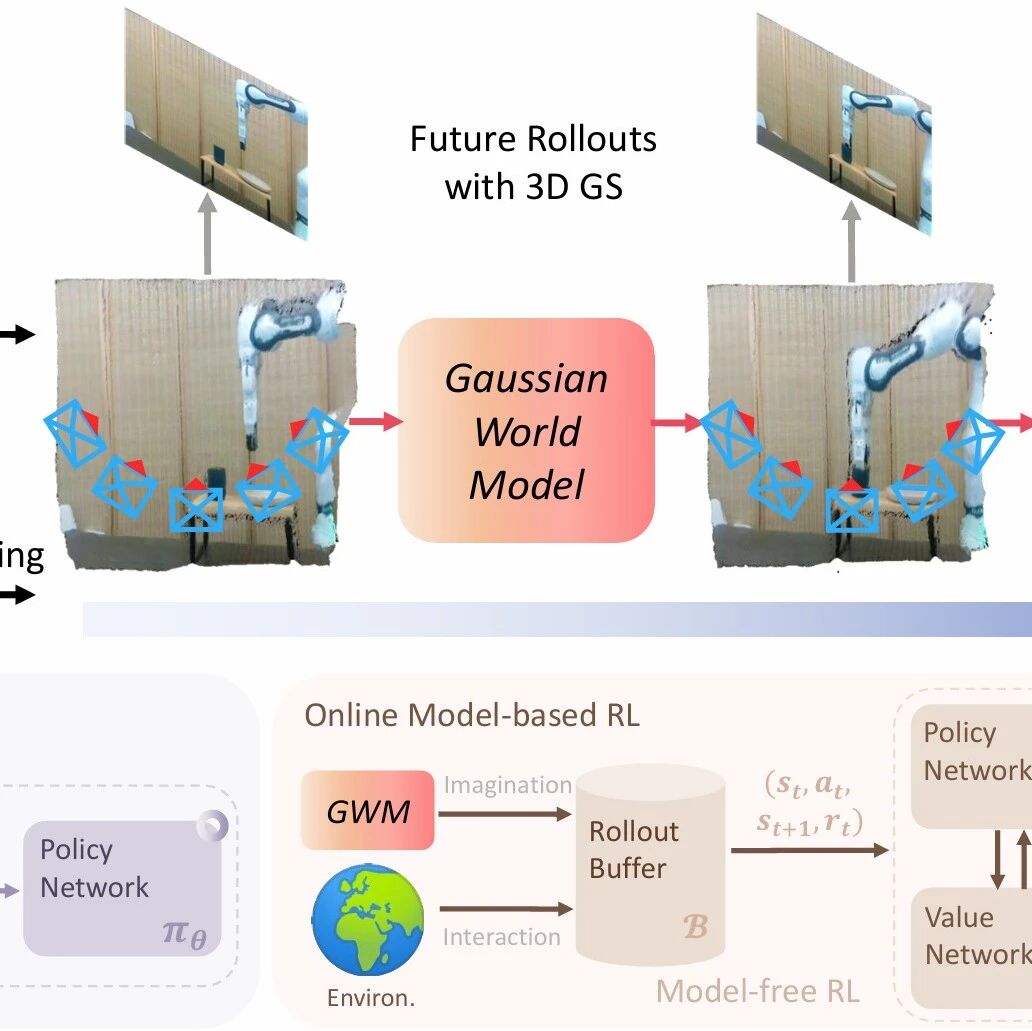
7.1 赠送课程1:机器人抓取从入门到实战

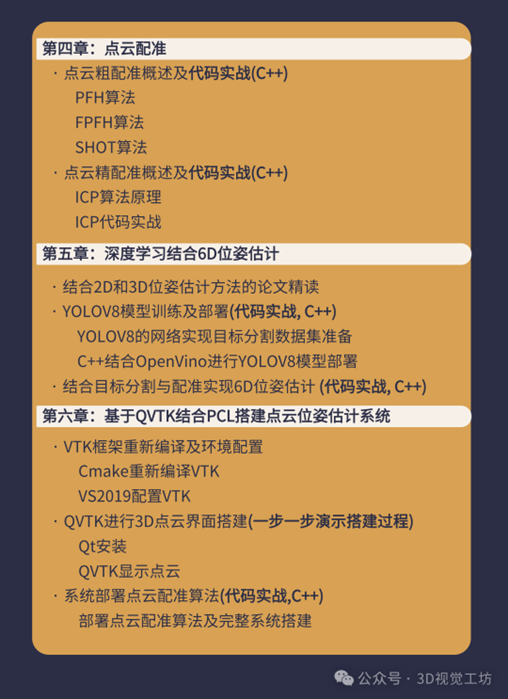
7.2 赠送课程2:机械臂6D位姿估计抓取从入门到精通

购买说明
本套NexusPickit-S1软件支持离线数据读取,无需硬件,也可以进行学习和实操。
目前S1版本支持的配准方案是基于相机直接采集的点云作为模板去配准,另一种是用CAD模型去场景配准,后续会在S1版本软件中升级更新。
本套软件目前支持的3D相机为KW-MINI(用户根据需要采购)。
八 产品采购渠道