

宣称手柄用的霍尔摇杆,这个如果是真的,基本可以秒杀99%的儿童玩具了。

但是它控制做的确实不错,满量程打杆的时候,前轮转向幅度也最大。

而少量打杆的时候,前轮转向幅度也比较小,基本上打杆量和转向幅度是线性关系。
今天先拆解研究这个车,首先看看外观。蓝色的车身锃光瓦亮的,这个外壳的设计和做工都非常有质感。

从侧面看还真有点高端跑车的既视感。

看这大轮毂。

车的地盘看着也是用的不错的塑料。整个车用的塑料都不错,刚买来拆箱后,闻起来没有任何异味。

车的型号是P-201-L,充电口是Type-C口的,平时不充电时有硅胶塞保护。

后车轮上有一个驱动齿轮。附近的地盘上是电源开关。

我仔细研究一些细节时才发现,设计这个玩具车结构的人好像非常懂汽车,或许就是以前在汽车企业上班的。你看这个前轮转向连杆末端,开的并不是一个圆孔,而是一个圆弧槽口,这使得轮子旋转式有一定灵活性。
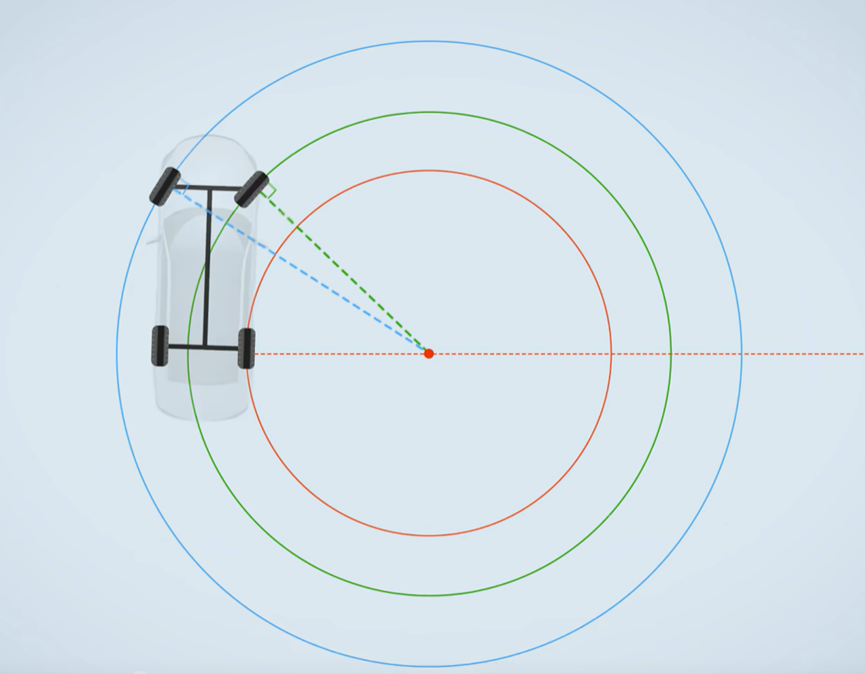
要知道:汽车转向时,左前轮和右前轮的转向半径不是一样的(外侧轮跑大圆,转向半径更大),如果直接留一个圆孔,那么任何时候转弯的时候,两个轮子的转动半径就只能一样,这就导致转向会很拧巴。这是我发现的第一个设计细节。上图来自B站视频:汽车转弯,竟然不是我们想的那样转车轮?!转弯原来是这样的!转向原理科普&线控转向体验。
整体来说,车轮转向是一个非常复杂的机制。除了转弯半径不同的问题,还有轮胎角度的问题,轮胎并不是垂直地面的,而是有一定倾斜度。但是这个玩具车通过一个转向连杆上的一个圆弧槽口就成功解决了转弯半径不同的问题。

接下来拆解。拿掉车壳之后,动力,转向系统都在地盘上,上面都有固定壳,看起来很整洁。
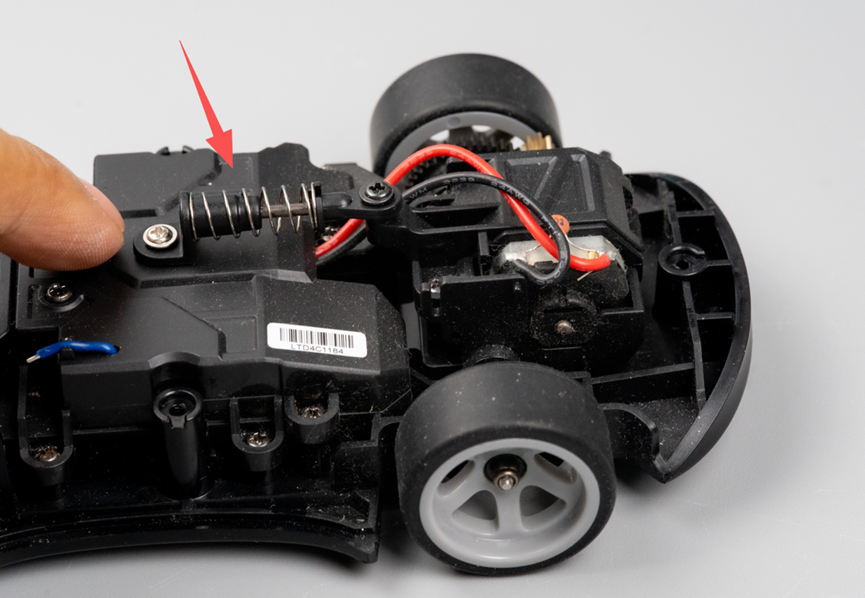
两个后轮和电机是一个整体。而且这个整体是做了减震的。
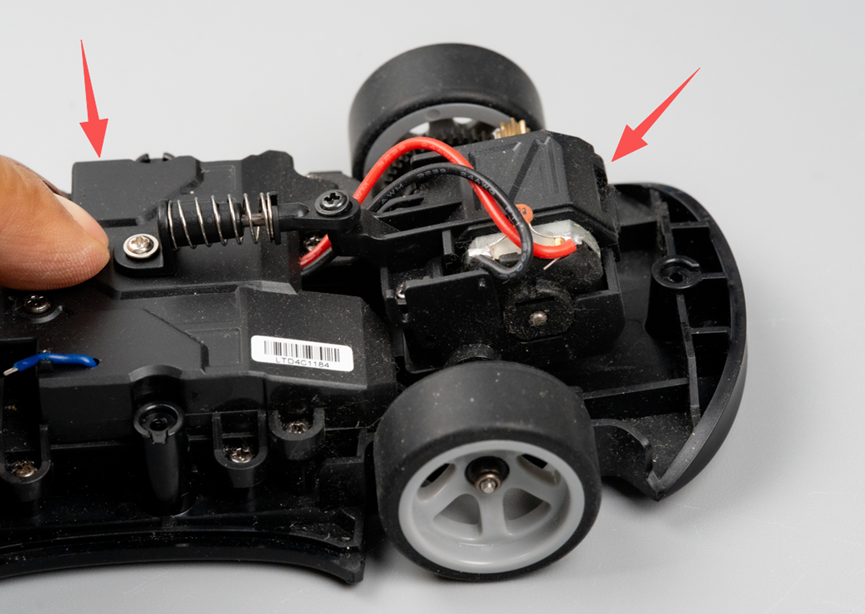
当在车身上施加一个向下的压力时,地盘下降,同时电机壳这里很明显翘起来了,带着两个后轮一起起来了。这套减震系统设计的简单但实用。

减震器细节。

电机出轴上带了一个铜齿轮,带动轮胎旁边的塑料齿轮,进而带动两个轮子转动。
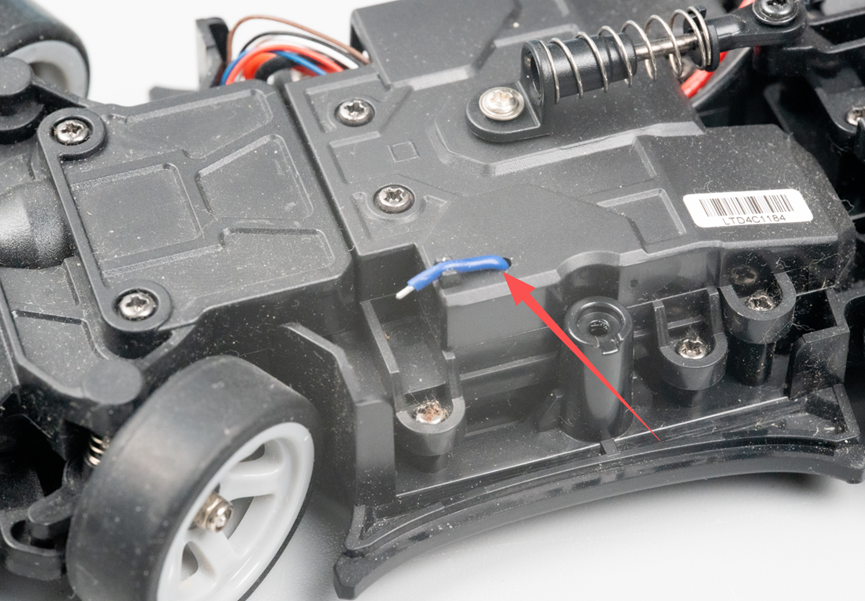
这里伸出一根线头,很显然这是遥控的天线了。而这个壳体下面应该就是电路板了。
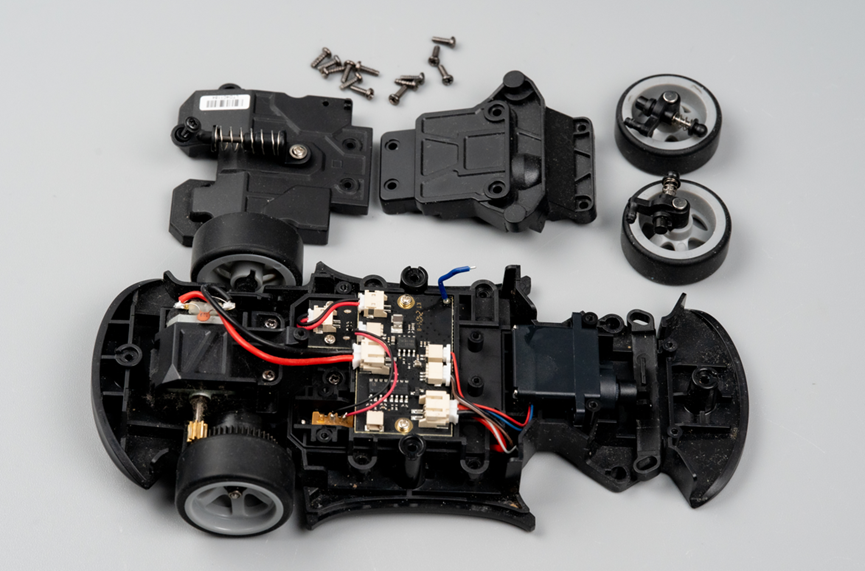
接下来拆掉电路板和前轮上面的壳子,就可以看到电路板和舵机等组件了。

两个前轮,带独立减震。

这里又来一个细节,最底下这个它竟然不是直的,而是有一定角度,看着是挺不舒服对吧,但是这个设计很重要。我前面说了,车转弯的时候,除了两个轮子转弯半径不同,轮子还有倾斜角,而这点角度就让轮子转弯的时候产生了倾斜,这设计细节,恐怕设计这个玩具的人真的是懂车的。
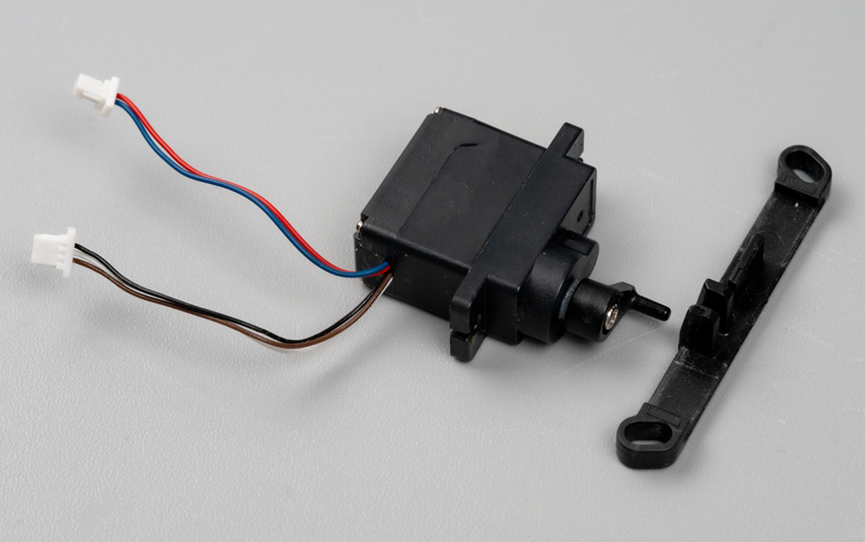
这是驱动转向的舵机和连杆。我没看懂为啥这个舵机要有两组线束,一组是内部空心杯电机电源和地,另一组三根线就没必要了啊,直接给个PWM驱动就行了啊。

电路板上有后轮直流电机的连接器、Type-C充电板连接器、开关连接器、电池连接器、舵机连接器。
小小的板子也用了黑色油墨加焊盘沉金工艺。还用了一个1210的MLCC电感,这在玩具里这么用,也是挺奢侈的。当然,它这个做工用料和价格,肯定已经跳出了大路货儿童玩具的价格,所以也就不足为奇。
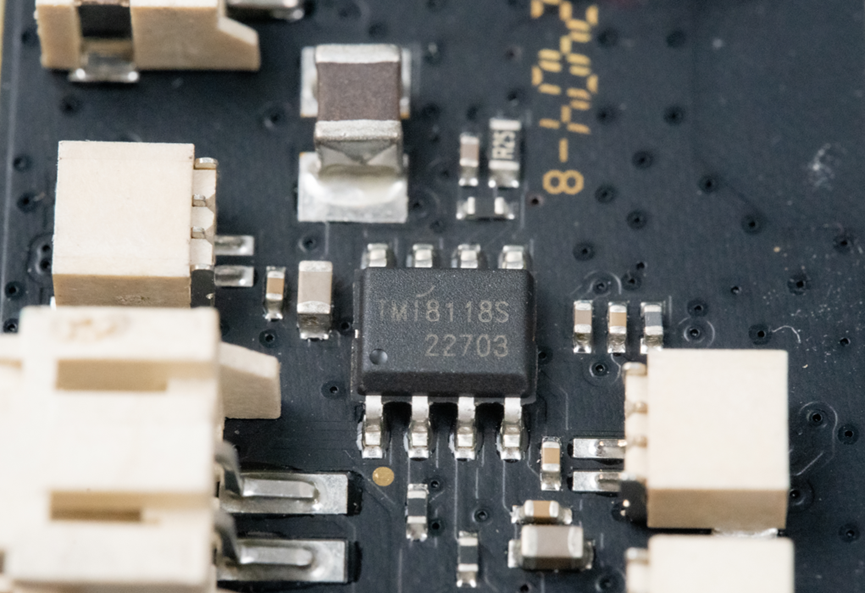
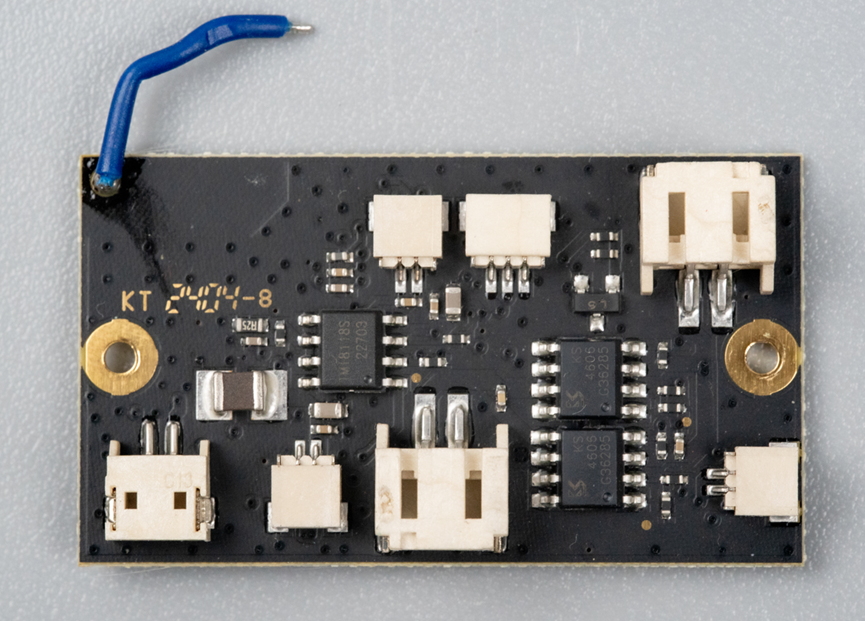
重点关注一下无刷电机驱动器,用的是拓尔微的TM18118S。这是一个单通道工作电压最高7.2V的直流电机驱动芯片,用它来驱动后轮电机。

遥控器天线,天线附近的铜皮做了净空。
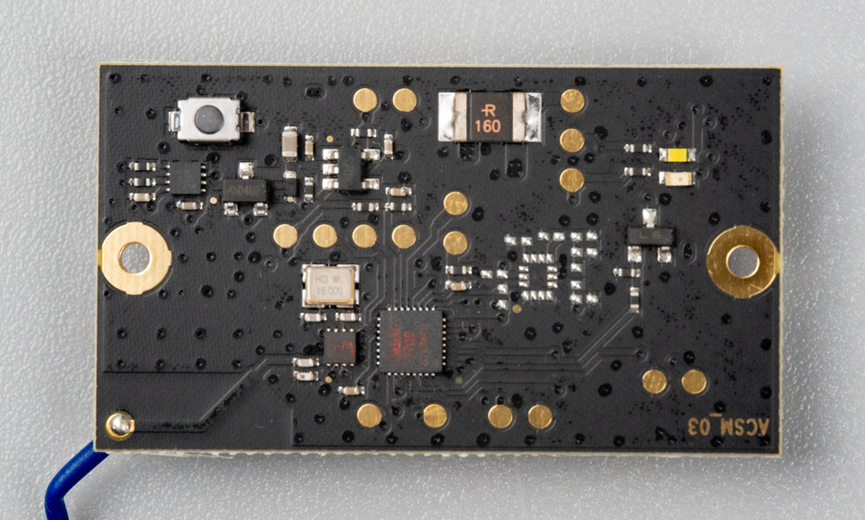
电路板另一面。
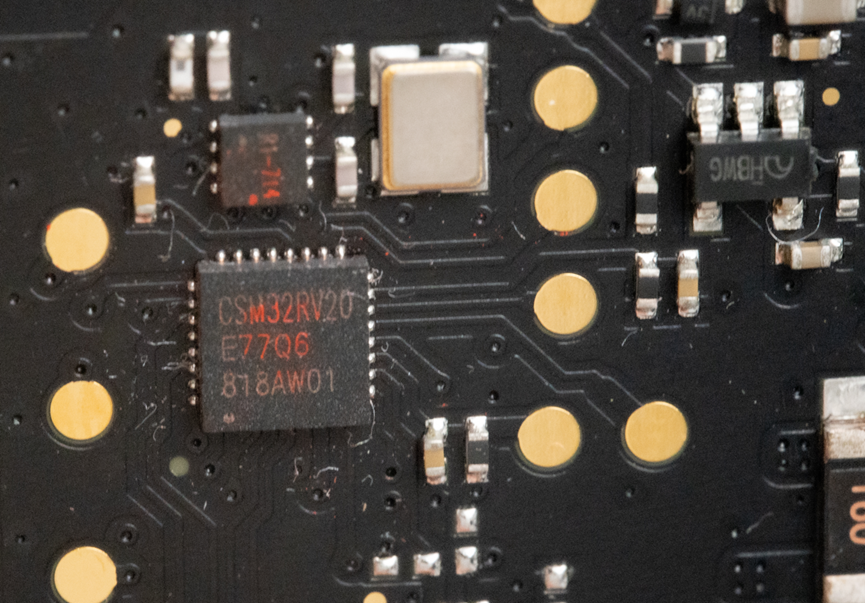
主控芯片的型号是CSM32RV20,这是南京中科微的一个RISC-V内核的单片机。

单片机旁边是一颗来自中科微的Ci24R1,这是一颗调制方式GFSK/FSK的2.4G遥控器芯片。这个芯片的封装形式超级简单,DFN-8的封装,三个引脚是SPI通信用,两个引脚连接16MHz晶振,另外就是电源和地,还有天线引出。其实中科微有把Si24R1和CSM32RV20合封在一起的SoC芯片我最近正在用,相当于上面两个芯片塞到了一个封装。

这个位置很显然是一个LGA-14封装的陀螺仪预留位,看来他们当初也想过给里面塞陀螺仪,这样可以实现一些姿态控制等等,不过对于遥控车,陀螺仪的应用场景就不是很丰富。
接下来看看另外的组件。

Type-C充电小板也是黑色沉金的。
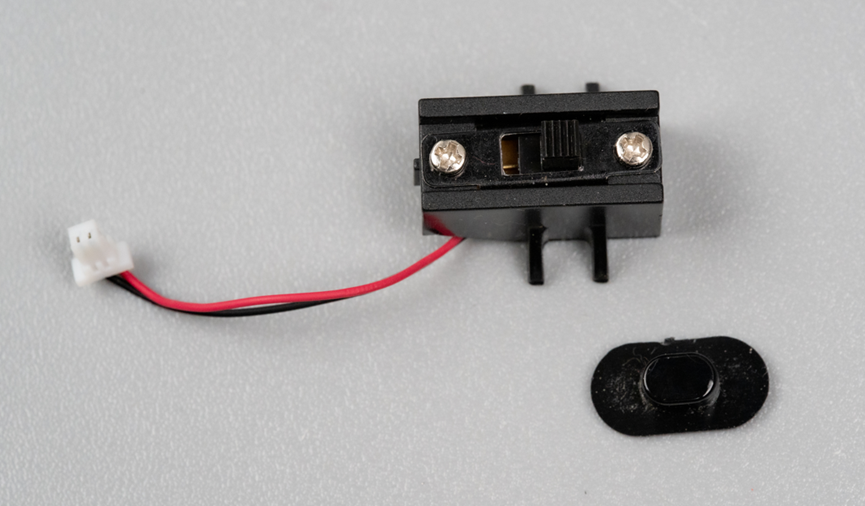
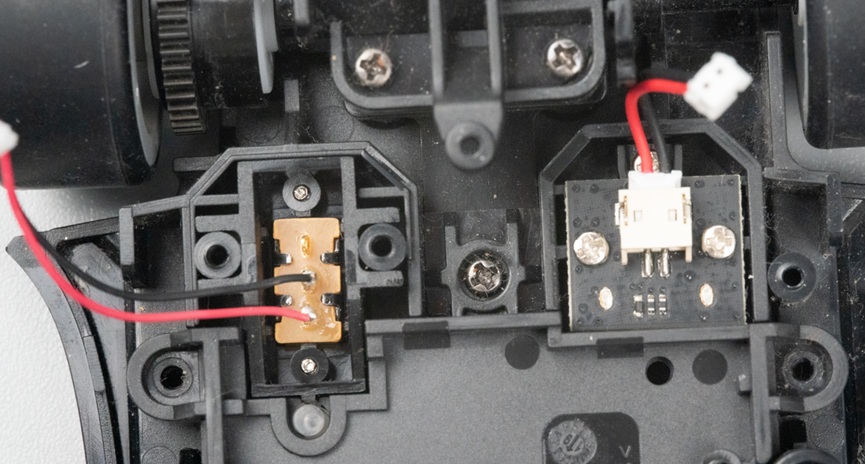
这是电源开关及塑料件。
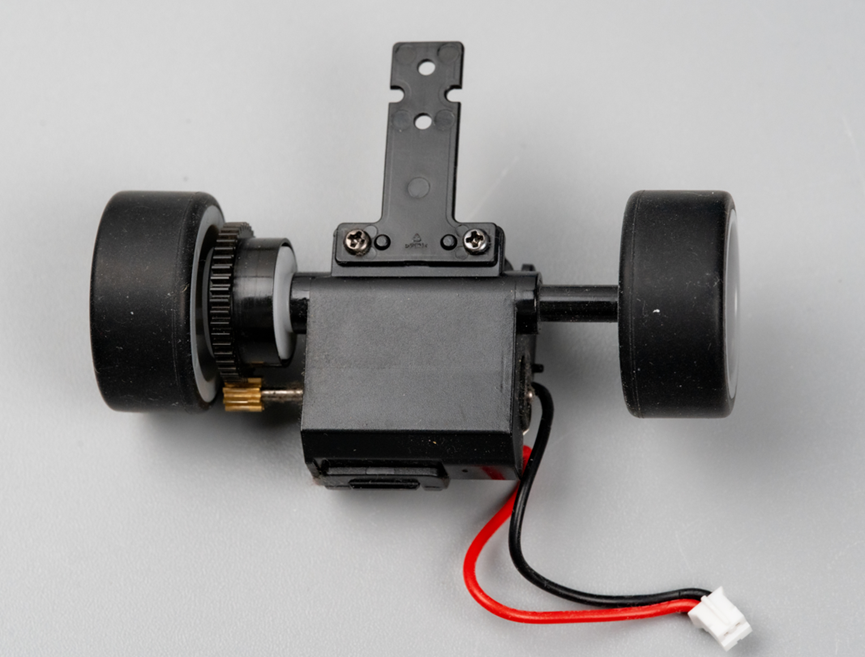
接下来拆解了后轮总成。通过中间伸出的这个薄片上的两个螺丝孔固定到车身上。
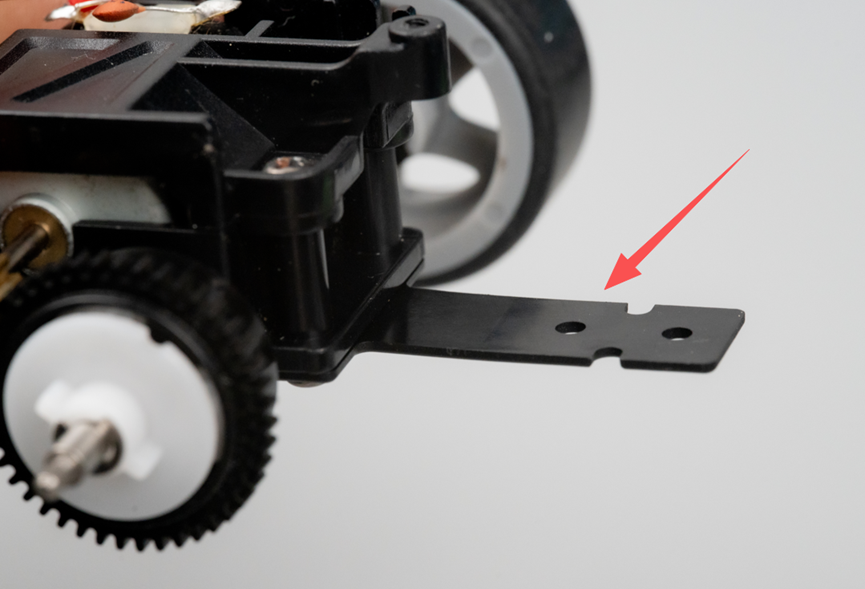
设计成薄片的原因是减震工作的时候,这个薄片要能弯曲。
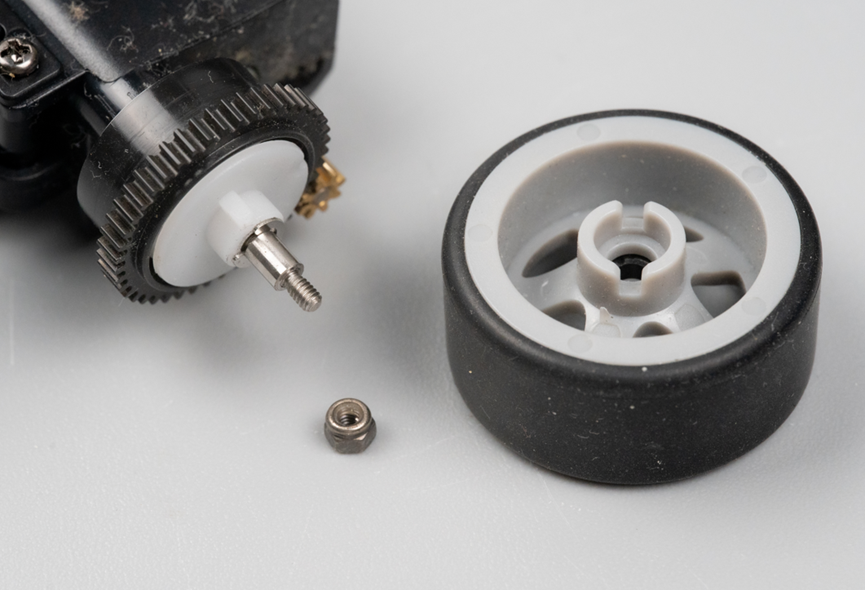
拆下一个车轮。

这个塑料齿轮里好像有点东西啊。但是端盖上有一个卡簧,需要先把卡簧拆掉。
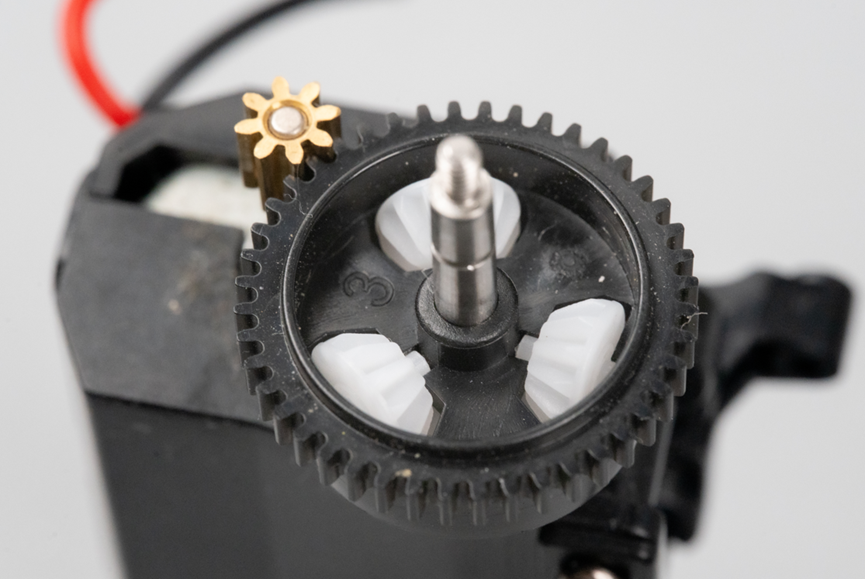
去掉卡簧和顶盖,发现里面居然有三个这样分布的小齿轮。这是个啥啊,这是个差速器啊。没想到这么一个玩具遥控车,居然用上了差速器。怪不得我一开始把这个车拿在手里把玩的时候,用手拨动一个后轮,就发现另一个后轮朝相反方向转动,我早就应该想到里面用了差速器的。
当汽车转弯的时候,两个前轮转弯半径不同,两个后轮的线速度也不同啊,这就导致一个转的快,一个转的慢,如果用一个电机直接驱动两个轮子,那么两个轮子的转速肯定相同,那转弯的时候就会出问题,要不齿轮坏了,要不外轮会打滑,而且直观的感觉就是方向盘特重(有电子助力的时候这个也感觉不到了)。有了差速器就可以解决这个问题。
所以,在玩这个玩具遥控车的时候,会感觉非常丝滑。那我觉得这个玩具车的设计者可以再大胆一点,给这个车加把差速锁,地盘加高一点,让我出去玩个越野,哈哈。
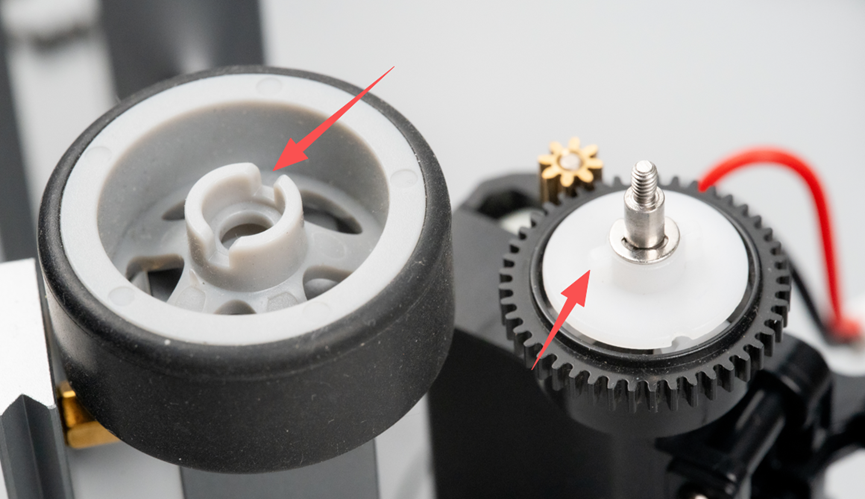
轮胎和这个齿轮侧面的白色盘上设计了键齿咬合的方式,用来传递力矩。
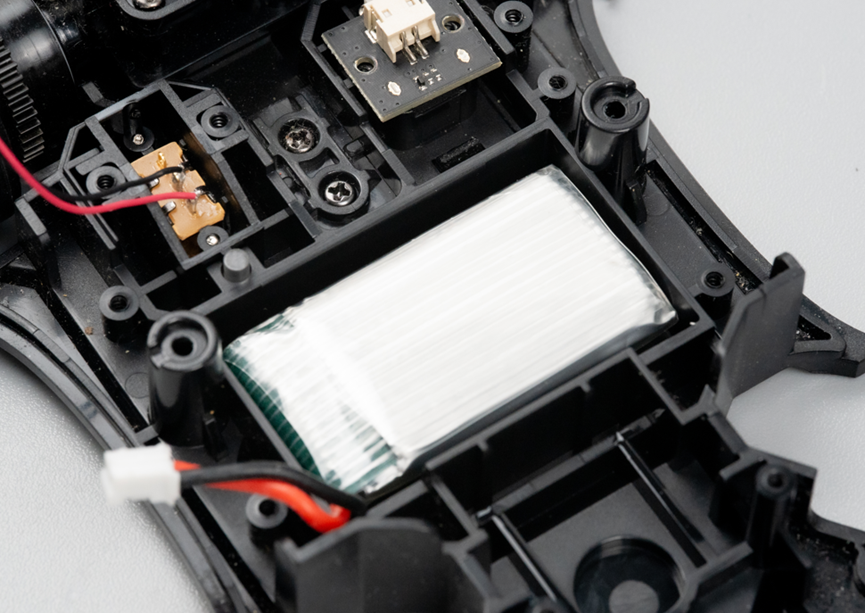
另外,这个车里用的是这种聚合物锂电池。

锂电池底部有3M胶粘在电池仓底壳,所以看不见容量,但是按照这个尺寸看,应该600mAh左右,这种电池我也在用。

这个车里面用的主要螺丝就是这两种,电路板固定用的是左边的四个。结构固定用的是右边的这种,都是自攻螺丝。

以上就是这个玩具遥控车的拆解。以下是我个人的看法:
一,用的塑料不错。其次外壳的做工也挺漂亮,锃光瓦亮的像真车车漆一样,我很好奇这是什么表面处理工艺。
二,整车的设计细节比较多,前轮独立减震、后轮总成整体减震、用一个圆弧槽口解决了转弯半径的问题、前轮下臂弯曲解决了转弯时轮子需要倾斜的问题、差速器解决了转弯时后轮转速不一致的问题。
三,电路板做工用料不错,这么一个小玩具,用了沉金电路板,板子上甚至还用1210的MLCC。
四,装配比较容易。










